4. Исследование обучаемой системы управления,
установленной на робот ТУР-10К4.1. Выбор параметров обучаемой системы управления
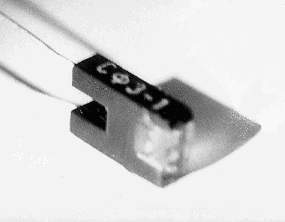
для промышленного робота ТУР-10КВ качестве рецепторов сетчатки технического глаза для робота ТУР-10К были использованы сто восемьдесят восемь фоторезисторов СФ3-1 (рис.4.1). Параметры фоторезистора: габарит в мм – 2х1,5х1,2; площадь окна в мм – 0,5х1,5; световой ток – 750 мкА; напряжение питания – 15В; темновой ток – 0,5 мкА; постоянные времени: нарастания – 0,06 сек, спада – 0,01 сек.
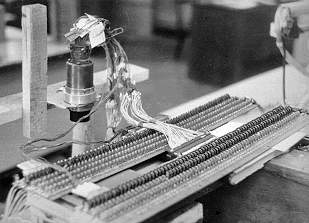
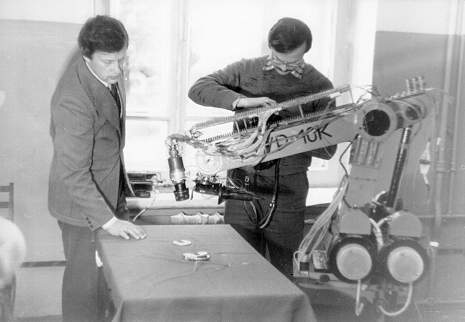
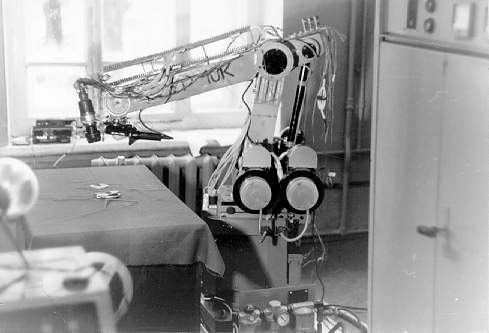
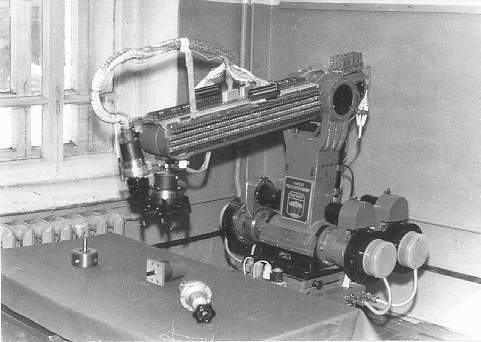
Фоторезисторы были светоизолированы с боковых сторон черной краской и склеены между собой, залиты эпоксидной смолой и вставлены в металлический корпус, который крепился на схвате робота (рис.4.2).

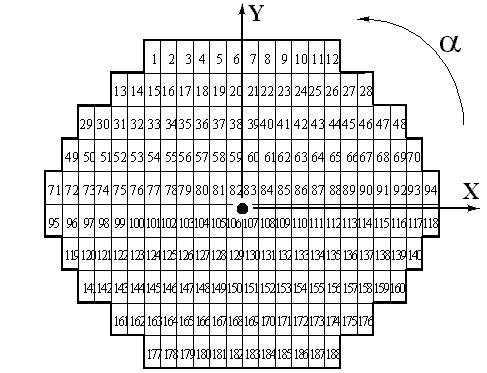
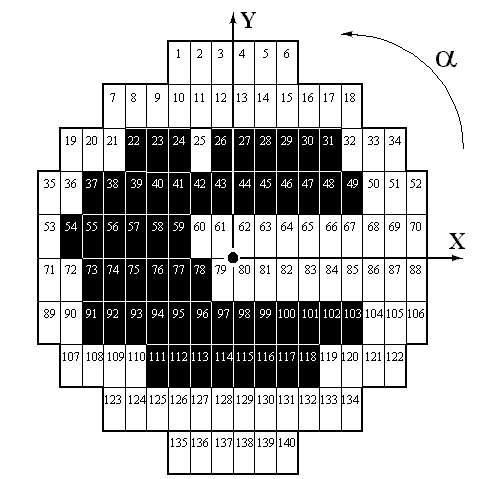
Расположение фоторезисторов в сетчатке и их нумерация показаны на рис.4.3.
Один из двух выходов каждого фоторезистора был соединен с общей шиной, предназначенной для подсоединения к источнику питания. Другой выход каждого фоторезистора отдельным проводком жгута (“зрительного нерва”) был соединен с соответствующим ему входом технического мозга. Изображение обозреваемой техническим глазом сцены передавалось на сетчатку фотообъективом HELIOS-44M 2/58.
Угол поворота схвата был ограничен пределами ±
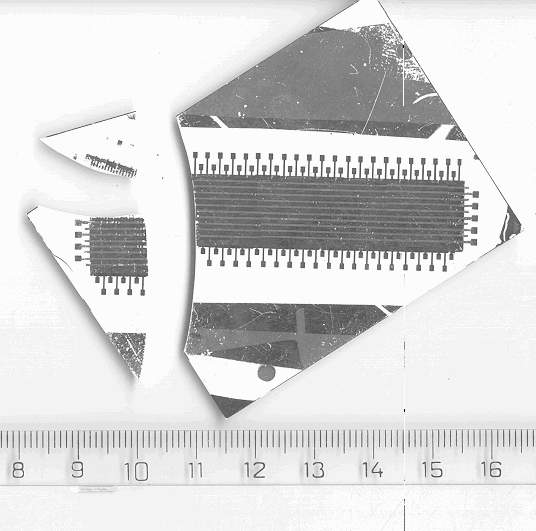
Матрица (рис.4.5) включала в себя 1200 (188х3: 188 – по числу выходов рецепторов технического глаза, 3 – по числу исполнительных двигателей) резисторов. Конструктивно матрица представляла собой две раскладывающиеся платы. С одной стороны каждая плата имела продольные проводящие дорожки, с другой стороны – поперечные. Подстроечные резисторы были напаяны на продольные дорожки, а контакты ползунов резисторов были соединены с поперечными дорожками, которые, в свою очередь, были соединены разъемами с выходами рецепторов технического глаза. Продольные дорожки соединены с входами блока усилителей, выходные сигналы которых являлись управляющими соответствующих электродвигателей робота.
Сопротивление нагрузочных резисторов технического мозга было выбрано равным 3 Ом. Такое маленькое сопротивление в сравнении с резисторными элементами матрицы мозга обеспечивало отсутствие блуждающих токов в матрице.
Обучаемая система управляющего зрения робота формировала слаботочный биполярный выходной сигнал постоянного тока величиной до 0,5 мА и напряжением порядка 10 мВ. Для сопряжения системы с приводами промышленного робота ТУР-10К был разработан усилитель постоянного тока на пять каналов – по числу исполнительных двигателей робота. Усилитель одного канала был собран по схеме двухкаскадного усиления с использованием микросхем КР 140 УД 608 (рис.4.6).
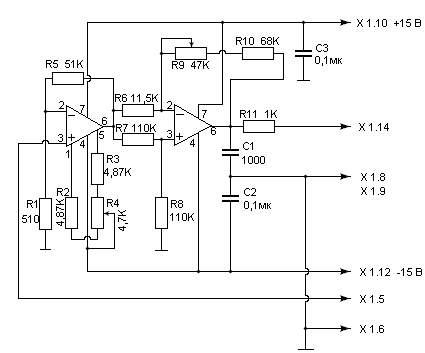
Входными являлись сигналы технического мозга, подаваемые на контакты X1.5, X1.6 (разъем марки МРН14-10387), а выходные снимались с контактов X1.14, X1.18 (X1.19) и подавались на управляющие входы приводов робота. Коэффициент усиления по каждому каналу устанавливался в пределах 500...1000.
Питание микросхем осуществлялось от независимого источника постоянного тока (контакты X1.10, X1.12). Обратная связь осуществлялась по инверсному входу. Установка нулевого потенциала на выходе усилителя производилась подстроечным резистором R4, включенным между выводами 1 и 5 первой микросхемы при нулевом входном сигнале. В качестве подстроечного резистора был использован многооборотный резистор типа СПБ-2. Получение необходимого коэффициента усиления осуществлялось подстроечным резистором R9. Нулевые клеммы приводов робота были соединены с нулевой клеммой источника питания усилителей. После подключения блока усилителей требовалась выдержка времени 5...10 минут для прогрева с целью уменьшения дрейфа нулей усилителей. Изготовили усилители работники Липецкого кооператива “Протон” в августе 1989 года.
Схема подключений робота ТУР 10К с обучаемой системы управления показана на рис.4.7, б в сравнении с подключением стойки УЧПУ УКМ772 (рис.4.7, а).
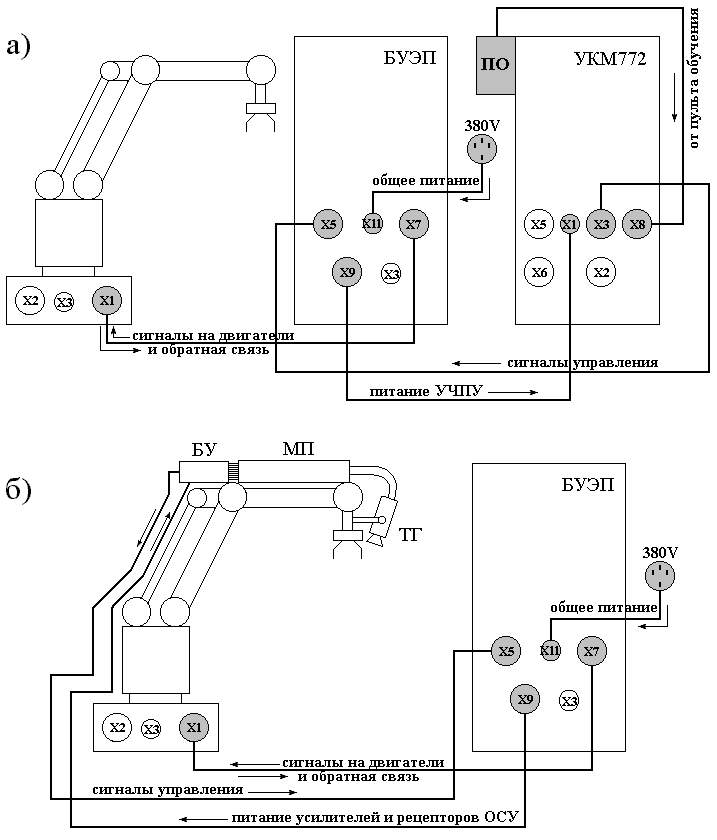
В схеме использованы следующие обозначения: БУЭП – стойка блоков усилителей электропитания; УКМ772 – стойка числового программного управления; ПО – пульт обучаемого программирования; ТГ – технический глаз; МП – матрица-преобразователь обучаемой системы управления; БУ – блок усилителей обучаемой системы управления.
Управление отдельным приводом осуществлялось в соответствии со схемой, представленной на рис.4.8:
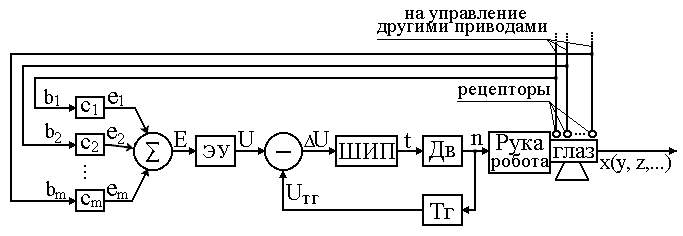
Обозначения:
4.2. Методика обучения робота ТУР-10К с обучаемойсистемой управления
со зрением поиску заданного предмета среди прочих4.2.1. Разработка методики выбора ситуаций обучаемой
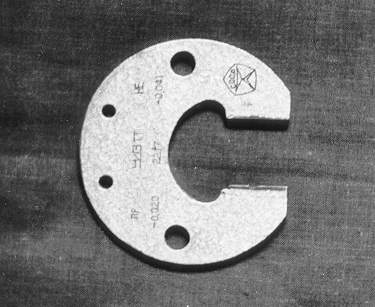
выборки для решения задачи поиска заданного предметаПервой задачей, выполнению которой был обучен робот с обучаемой системой управления, была задача поиска измерительной скобы, расположенной на более темном фоне (рис.4.9).
Целевой была определена ситуация, когда изображение скобы находилось по центру поля зрения технического глаза в соответствии с рис.4.10. На рисунке черным цветом выделены рецепторы сетчатки, которые изменили свою проводимость по сравнению с ситуацией, когда глаз глядел на чистый фон.
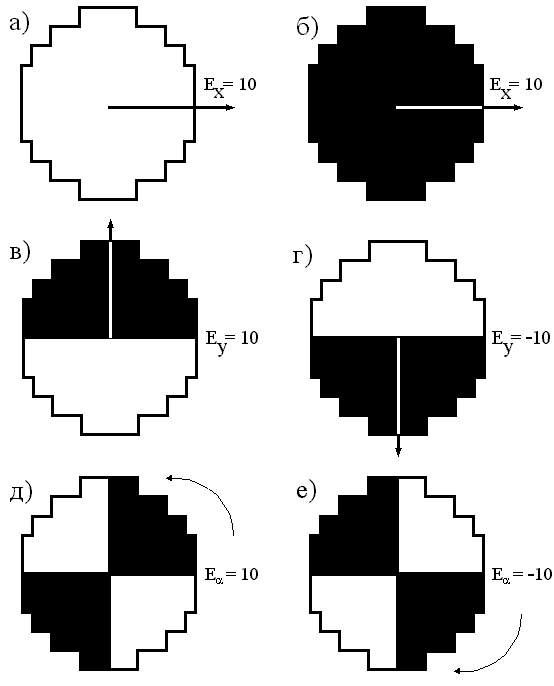
Были определены опорные ситуации обучения, представленные на рис.4.11 (а, б, в, г, д, е). Первая ситуация (рис.4.11 а) – глаз видит только фон, вторая ситуация (рис.4.11 б) – обобщенная, охватывает любые посторонние предметы, попадающие в поле зрения технического глаза. Эти две ситуации использовались для обучения продольному (сканирующему) движению руки робота вдоль стола, на котором лежала измерительная скоба. Третья опорная ситуация (рис.4.11 в) охватывала случаи, когда какой-либо предмет попадал в поле зрения глаза робота с внешней стороны. Четвертая ситуация (рис.4.11 г) – предмет попадает в поле зрения глаза робота с внутренней стороны. Третья и четвертая ситуации использовались для обучения робота поперечному движению относительно стола. Пятая (рис.4.11 д) и шестая (рис.4.11 е) ситуации использовались для обучения робота повороту схвата в случаях, когда в поле зрения попадал несимметричный предмет.
Далее, были проведены замеры возбуждений (проводимостей) рецепторов сетчатки в двух ситуациях: когда технический глаз был направлен на светлый фон и когда он был направлен на темный фон. Полученные замеры использовались для формирования всех опорных ситуаций обучения. Причем следует отметить, что проводимости фоторезисторов сетчатки значительно различались даже в ситуациях, когда глаз смотрел, например, на чистый фон. Различная чувствительность фоторезисторов учитывалась в процессе обучения и отражалась в расчетных значениях долей сигналов управления каждого рецептора. Значения долей сигналов управления от рецепторов сетчатки по каждому исполнительному двигателю рассчитывались на компьютере.
4.2.2. Настройка резисторной матрицы обучаемой системы
управления и результат обученияНастройка матрицы мозга осуществлялась следующим образом. К парным выходам матрицы, соответствующим определенному исполнительному двигателю, подключался вольтметр, и при помощи ключа изменялись проводимости резисторных элементов так, чтобы получить расчетное значение доли сигнала управления (рис.4.12).
Практическое обучение робота настройкой долей сигналов управления позволило найти прием обучения, который можно условно назвать “обучение на белом листе”. Этот прием заключается в том, что доли сигнала управления пересчитываются относительно некоторой опорной ситуации, в которой рецепторы сетчатки технического глаза освещены более или менее равномерно. Такое условие можно выполнить в частности, если направить технический глаз на лист белой бумаги. Настройка матрицы технического мозга в такой ситуации дает более точный результат, т.к. все рецепторы технического глаза возбуждены примерно одинаково. В других ситуациях на часть рецепторов может не попасть освещение, поэтому настроить их доли управляющих сигналов практически невозможно.
Первый поиск заданного предмета (измерительной скобы) роботом ТУР-10К с обучаемой системой управляющего зрения был осуществлен 4 сентября 1989 года (рис.4.13).
Робот, обученный поиску заданного предмета, оказался способным решать еще ряд самостоятельных задач. Он выполнял отслеживание произвольной траектории, заданной белой полосой переменной ширины. Причем скорость движения руки робота менялась: при увеличении ширины движение замедлялось, при уменьшении ширины – ускорялось. Кроме того, обученный робот преследовал найденный предмет, а при смене полярности сигнала управляющего двигателем поперечного перемещения, решал задачу уклонения от предметов при движении вдоль стола (рис.4.14).
Отличие данной системы от систем технического зрения можно охарактеризовать следующим сравнением. Традиционная система технического зрения является как бы “поводырем” слепого робота. Такая система воспринимает зримую информацию, анализирует ее (распознает), принимает определенное решение и дает команды роботу, направленные на выполнение этого решения, т.е. она работает независимо от робота. Робот же, оснащенный обучаемой системой управляющего зрения, сам является зрячим. Зрительная информация, воспринимаемая его техническим глазом или глазами, непосредственно преобразуется техническим мозгом в сигналы управления исполнительными двигателями, минуя стадии распознавания и принятия решения. Движения робота изменяют воспринимаемую зрительную информацию, что изменяет сигналы управления. Таким образом робот действует в окружающей его обстановке.
По мере расширения понимания принципов работы обучаемых систем управления мы вносили изменения и в конструкцию экспериментальной системы управляющего зрения робота ТУР-10К.
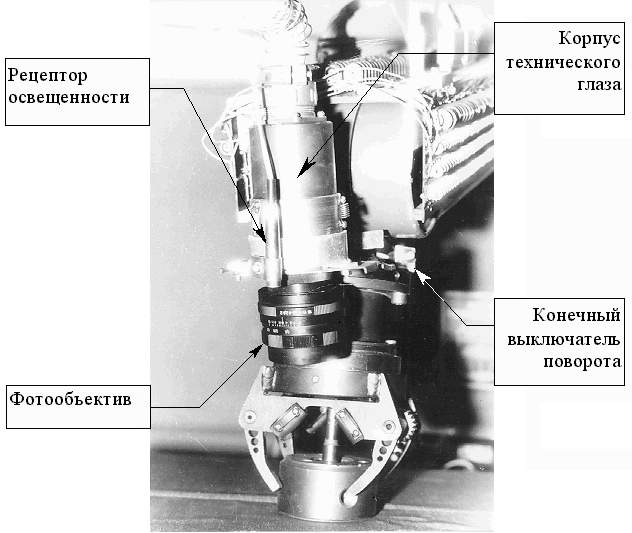
В частности, по сравнению с первым вариантом обучаемой системы, в нее был добавлен рецептор общей освещенности и командные рецепторы. Рецептор общей освещенности представлял собой отдельный фоторезистор, размещенный в трубке, направленной на поле зрения технического глаза (рис.4.15).
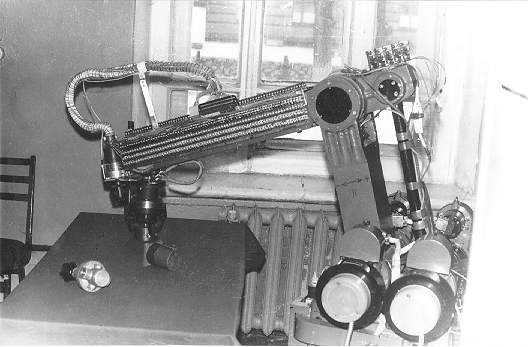
В процессе экспериментальных исследований робот ТУР-10К обучался выполнению различных задач: поиску заданных предметов, отслеживанию “шва”, уклонению от предметов, преследованию подвижных предметов (рис.4.16). Эти задачи использовались в лабораторных работах для студентов Липецкого политехнического института и для демонстрации возможностей обучаемых систем управления различным комиссиям и в рекламных целях.
Работы велись при финансировании Елецким заводом тракторных гидроагрегатов (главный инженер Самохин А.В.) по хозяйственному договору с ЛипПИ 8938 “Обучаемые нейрокибернетические системы управления” и Грязинским заводом гидрооборудования (главный инженер Остапенко А.А.) по хозяйственному договору с ЛипПИ 8968 “Обучаемые нейрокибернетические системы управления
”.
4.3. Свойства и особенности обучаемых систем управления,
выявленные в результате исследованийВ результате исследований были выявлены некоторые свойства и особенности обучаемых систем и процесса их обучения.
Память обучаемых систем управления. Сформированные в результате обучения проводимости резисторных элементов технического мозга отражают все ситуации, использованные в обучаемой выборке, т.е. в обучаемых системах управления нет блока памяти в виде пространственного накопителя информации, в котором бы хранилась информация о каждой отдельной ситуации обучаемой выборки. Память в обучаемых системах управления – это функция технического мозга (а не некое материальное устройство, как в компьютерах), способность формировать требуемые сигналы управления в определенных ситуациях. При этом отсутствует процедура распознавания ситуаций, как предварительная процедура перед формированием правильного сигнала управления. Память обучаемых систем управления – распределенная. Каждый резисторный элемент матрицы мозга определяет свою долю сигнала с соответствующего выхода рецептора в формировании сигнала управления отдельного столбца матрицы мозга для данной ситуации. При достаточной избыточности рецепторов очувствления потеря части элементов мозга не сказывается на работоспособности системы, а при выходе сигнала управления за пределы допустимого эта потеря может быть компенсирована дообучением.
Некоторые правила обучения обучаемых систем. Прежде чем включить обучаемую систему управления в работу, ее необходимо обучить, т.е. настроить регулируемые резисторные элементы технического мозга таким образом, чтобы обеспечить выполнение объектом управления поставленных перед ним задач. При этом методы обучения могут быть различными: динамическое обучение, когда обучение ведется без отключения выходов обучаемой системы управления от исполнительных двигателей объекта управления, а сигналы обучения, изменяющие проводимости элементов мозга, подаются во время движения объекта управления, и статическое обучение с отключением выходов системы от исполнительных двигателей, правильность которого определяется по величинам сигналов управления, измеряемых приборами. Может быть использовано пассивное обучение с многократным циклическим "вождением за руку", когда для обучения используются все возникающие при работе объекта ситуации, или активное обучение, когда обучение ведется в некоторых наиболее характерных для данной задачи ситуациях, составляющих обучаемую выборку. Скорость обучения зависит от правильности подбора ситуаций в обучаемую выборку и от порядка чередования ситуаций при обучении. Обучение можно ускорить, если на каждом шаге обучения определять ситуацию, в которой отношение отклонения сигнала управления к допустимому отклонению этого сигнала в данной ситуации было наибольшим, и проводить очередную корректировку проводимостей элементов матрицы технического мозга именно в этой ситуации.
Практическое обучение робота с обучаемой системой управления со зрением выполнению различных задач позволило выявить ряд общих правил обучения:
1. Терпимость. Это правило заключается в том, что нельзя слишком жестко регламентировать движения робота; важно только, чтобы он выполнял задачу, т.е. достигал целевых ситуаций с требуемой точностью. Допуски же на точность движений робота в остальных ситуациях должны быть максимально широкими.
2. Непротиворечивость. Это правило означает, что сигналы управления в ситуациях обучаемой выборки должны достигаться обучением с заданной точностью. Противоречивость обучения заключается в задании таких сигналов на выходах мозга в ситуациях обучаемой выборки, которые не могут быть сформированы одним и тем же набором проводимостей резисторных элементов технического мозга. Примером противоречивого обучения можно считать требование разных сигналов на выходах мозга в ситуациях, в которых совпадают выходные сигналы рецепторов, подаваемых на строчные шины матрицы технического мозга. Противоречивость можно устранить расширением системы очувствления за счет рецепторов, которые в данных ситуациях будут иметь различные возбуждения.
3.
Правило последнего предъявления целевой ситуации. Поскольку требуемая точность сигналов управления в целевых ситуациях наиболее высокая, то предъявление ее последней в процессе обучения является оптимальным, т.к. полученные сигналы не будут искажены следующими шагами обучения.Свойство обратимости обучаемых систем управления. Обезличенность рецепторов обучаемых систем управления определяет их особенность, которую можно назвать обратимостью. Заключается она в том, что обучение системы идет по тем же самым каналам, по которым в рабочем режиме происходит управление объектом. Эта особенность позволяет снизить требования к элементам системы. Разброс характеристик, например, рецепторов учитывается при обучении и не влияет на качество работы. Нам не важно как возбуждается рецептор системы очувствления под действием раздражения в рабочем режиме, т.к. именно через него шло формирование соответствующих ему весовых коэффициентов (проводимостей резисторных элементов матрицы мозга), и поэтому, возбуждаясь в рабочем режиме так же как и при обучении, он будет выполнять свои функции. Поэтому, если до обучения подсоединение рецепторов к строчным шинам матрицы технического мозга может носить случайный характер, то по окончании обучения переподсоединение их недопустимо. В программируемых системах управления такой обратимости быть не может, ко всем элементам таких систем предъявляются жесткие требования к заданным характеристикам.
Особенность подхода к вопросу точности обучаемых систем управления. Точность позиционирования робота с обучаемой системой управления определяется только разрешающей способностью его системы очувствления и точностью обучения в целевых ситуациях и практически не зависит от погрешностей механической части робота. Например, при движении схвата в сторону целевой ситуации будут автоматически выбираться люфты, компенсироваться погрешности изготовления, упругие и постоянные деформации его частей, т.к. любое отклонение от целевой ситуации, фиксируемое системой очувствления робота, будет формировать сигналы управления приводами до тех пор, пока текущий образ ситуации полностью не совпадет с целевым.
Увеличение разрешающей способности системы очувствления позволяет увеличивать точность позиционирования до предела, определяемого возможностями приводов манипулятора, который, однако, может быть существенно расширен применением дополнительных устройств, например для поступательного движения можно использовать вращение микрометрического винта.
Важно отметить, что ужесточать требования к точности позиционирования следует только в целевых ситуациях и в случае необходимости, т.к. это приводит к увеличению продолжительности обучения. В промежуточных ситуациях обучаемой выборки требования к точности могут быть максимально снижены.
Особенность подхода к надежности обучаемых систем управления. Структура обучаемой системы определяет новый подход к надежности ее работы [63]. Принято считать, что увеличение числа элементов любой системы приводит к снижению надежности ее работы. Это утверждение верно для логических систем, когда выход из строя любого элемента приводит к полному отказу всей системы. Для обучаемых систем – наоборот: чем больше в такой системе элементов, тем надежнее ее работа. Избыточность рецепторов не равнозначна простому дублированию ими друг друга. Каждый рецептор вносит свою долю в общую величину сигнала управления. Эта доля определяется значением его весового коэффициента. Поэтому отказ отдельных рецепторов или искажение их информации приводит к искажению величины сигнала управления. Однако, чем больше избыточность рецепторов, тем меньше сказывается выход из строя отдельных элементов системы на ее работоспособность. Причем, появившаяся погрешность может быть компенсирована дообучением объекта за счет оставшихся рецепторов. Ремонт таких систем практически должен исчезнуть. Его во многом заменит дообучение объекта до требуемых параметров. Таким образом, обучаемые системы управления обладают высокой живучестью, аналогичной живучести биологических систем.
Надежность обучаемых систем управления можно повысить еще больше, используя равномерно-распределенный принцип построения этой системы (рис.4.17).
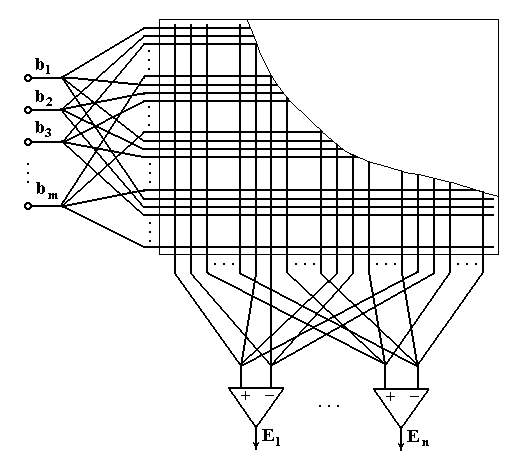
Этот принцип заключается в том, что отдельный выход каждого рецептора разделяется на множество выходов, по которым распределяется сигнал рецептора. Все выходы отдельного рецептора соединены со строчными шинами, равномерно распределенными по матрице мозга. То же самое – со столбцовыми шинами: с каждым входом усилителя или сумматора мозга соединяется множество столбцовых шин, равномерно распределенных по матрице. В микроэлектронном варианте обучаемой системы такое выполнение не приведет к значительному увеличению ее габаритов. Даже удаление целых участков матрицы мозга не повлияет на работоспособность такой обучаемой системы (рис.4.18).
Особенность подхода к вопросу быстродействия обучаемых систем управления. В обучаемых системах отсутствует процедура опроса датчиков, процедуры вычислений по решающим правилам и другие последовательные (логические) операции. Поток информации (сигналов) от рецепторов идет параллельно через резисторные элементы матрицы мозга, на выходах которой этот поток уже является сигналами управления исполнительными двигателями объекта управления. Таким образом, быстродействие обучаемых систем управления является практически мгновенным и ограничивается только инерционностью чувствительных элементов рецепторов системы очувствления.
Особенность динамики объекта с обучаемой системой управления. Динамика объекта с обучаемой системой управления характеризуется плавностью движений (плавными разгоном и торможением) и сглаженностью траекторий движения исполнительных органов объекта управления. Это определяется тем, что во время движения объекта ситуация, воспринимаемая его системой очувствления, не может измениться мгновенно и резко. На стробоскопии движения технического глаза при поиске ключа (рис.2.14) видно, что при приближении глаза к целевой ситуации его скорость уменьшается постепенно, пока не станет равной нулю, когда текущая ситуация полностью совпадет с целевой. Кроме этого, инерционность реальных рецепторов, например фоторезисторов, сглаживает резкие изменения освещенности.
Проявления адаптивности объекта с обучаемой системой управления. Как видно из примеров обучения поиску заданного предмета, обучение робота осуществляется в нескольких наиболее характерных ситуациях, отобранных в обучаемую выборку. Однако в процессе работы возникает множество ситуаций, неучтенных при обучении, и число которых стремится к бесконечности. Тем не менее, движения робота целенаправленны и в этих ситуациях. В отличие от систем, сравнивающих текущую ситуацию с эталонными, обучаемые системы формируют сигналы управления в любой ситуации – в этом заключается основная характеристика их адаптивности. Причем выходные сигналы в любой ситуации носят не вероятностный характер, а имеют строго определенные, детерминированные значения, определяемые весовыми коэффициентами, сформированными во время обучения. Можно сказать, что обучаемые системы – это детерминированные системы, работающие в недетерминированной среде.
| Site of Information
Technologies Designed by inftech@webservis.ru. |
|