|
|
ОГЛАВЛЕНИЕ
1. Аналитический обзор информационно-управляющих систем промышленных роботов
1.1. Современное состояние систем управления роботами, использующих процедуру обучения
1.2. Принципы функционирования обучаемых систем управления (технических нервных систем)
1.3. Сравнительный анализ адаптивных управляющих систем с распознаванием образов и обучаемых систем управления
1.4. Анализ вопросов аппаратной реализация систем управления роботами
2. Моделирование обучаемых систем управления
2.1. Математическое моделирование процесса обучения обучаемой системы управления
2.2. Закономерности процесса обучения, выявленные с помощью его математической модели
2.3. Имитационное моделирование обучения системы управления решению некоторых задач
3. Схемные решения обучаемых систем управления
3.1. Командные рецепторы обучаемой системы управления
3.2. Обучаемая система управления с внутренними обратными связями
3.3. Деление рецепторов обучаемой системы управления на группы
3.4. Обучаемая система управления с парными рецепторами
3.5. Распределитель выходных сигналов обучаемой системы управления
4. Исследование обучаемой системы управления, установленной на робот ТУР-10K
4.1. Выбор параметров обучаемой системы управления для промышленного робота ТУР-10К
4.2. Методика обучения робота ТУР-10К с обучаемой системой управления со зрением поиску заданного предмета среди прочих
4.3. Свойства и особенности обучаемых систем управления, выявленные в результате исследований
5. Реализация обучаемых систем управления
5.1. Варианты физической реализации обучаемых систем управления
5.2. Варианты электрической реализации обучаемых систем управления
5.3. Обучаемая система управления со зрением для промышленного робота РМ-01
6. Технический подход к проявлениям сложной нервной деятельности
6.1. Обучение и самообучение объекта с технической нервной системой
6.2. Чувства и эмоции объекта с технической нервной системой
6.3. Мышление объекта с технической нервной системой
В последние десятилетия двадцатого века произошел ряд событий, которые заставили человечество пожалеть о том, что у него пока нет железного помощника, способного самостоятельно действовать в сложной, опасной, постоянно меняющейся обстановке в реальном времени. Особенно, к сожалению, эти события коснулись нашей страны. Это, прежде всего, авария на Чернобыльской АЭС, где радиоактивные осколки, разбросанные по огромной территории в результате взрыва, приходилось собирать людям, так называемым ликвидаторам. Чем это для них обернулось – известно. Перечень таких событий можно продолжить: это и авария на атомной подводной лодке “Комсомолец”, и столкновение грузового модуля с орбитальной станцией “Мир”. Для ликвидации последствий таких аварий вместо человека необходимо использовать роботов, которые способны видеть, слышать, осязать, ощущать другие воздействия и действовать в соответствии с получаемой от своих органов чувств информацией. Использование таких роботов желательно не только в аварийных ситуациях, но и в условиях опасных производств, например химических, для освоения космоса и глубин океана. Впрочем, они могут найти применение везде, где действует человек.
1. Аналитический обзор информационно-управляющих систем промышленных роботов
1.1. Современное состояние систем управления роботами, использующих процедуру обучения
Существует множество систем управления роботами, по отношению к которым используется прилагательное “обучаемая” [9 – 15]. Можно выделить три основных типа автоматических систем управления, использующих процедуру обучения (рис.1.1).
Первый вариант обучаемых роботов (рис.1.1, а) имеет системы управления, в которых используется подход к решению задачи управления, заключающийся в жестком программировании обучением. Такие роботы могут функционировать только в детерминированной среде. Так называемое “обучение” этих роботов заключается в запоминании траектории движения, задаваемой обучателем, например методом “вождения за руку” (рис.1.2). В качестве аппаратной реализации используются системы числового программного управления (ЧПУ). Классическим примером такого робота является промышленный робот COAT-A-MATIC (Япония) [27]. Данные роботы не являются адаптивными и требуют полного упорядочения рабочей среды, подачи деталей и заготовок в стандартные позиции с известной ориентацией. Отсутствие информации о реальной внешней среде, которая является необходимой при выполнении таких технологических операций, как сборка, сварка и другие, а следовательно, невозможность учитывать состояние внешней среды при выработке управляющих воздействий системой управления, препятствует использованию таких роботов.
Кроме того, режимы обучения и автоматического воспроизведения движения по обученной траектории существенно различаются. Получающееся различие динамических нагрузок в режимах обучения и автоматической работы системы, а также наличие зазоров, трения и упругости механических передач между датчиками обратных связей по положению и звеньями руки являются основной причиной появления статических ошибок положения.
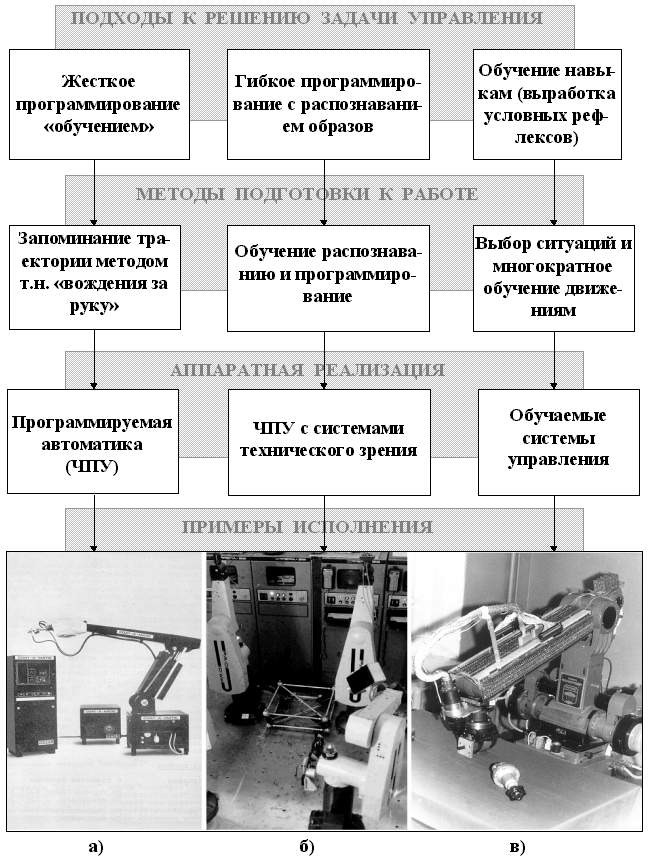
Рис.1.1. Основные типы систем автоматического управления роботами, в которых используется понятие “обучение”
Метод программирования обучением применяется в случаях, когда оператору известны все особенности будущих движений. При относительно сложной логике выполнения движения, зависящей от состояния внешнего оборудования, а также в тех случаях, когда программа движений формируется на основе обработки информации, воспринимаемой внешними сенсорами, программирование методом обучения становится непригодным. В этих случаях применяется метод адаптивного управления.
Дальнейшее развитие систем управления определялось теорией распознавания образов. Такие системы являются адаптивными так как позволяют учитывать изменения окружающей обстановки. Для получения функциональной способности таких систем управлять роботом применяется метод гибкого программирования с распознаванием образов [3 – 24]. Способность к распознаванию образов часто достигается с помощью процедуры обучения. Роботы, оснащенные такими системами – это второй вариант обучаемых роботов (рис.1.1, б). Они имеют более гибкие возможности, но работа их все равно программируется.
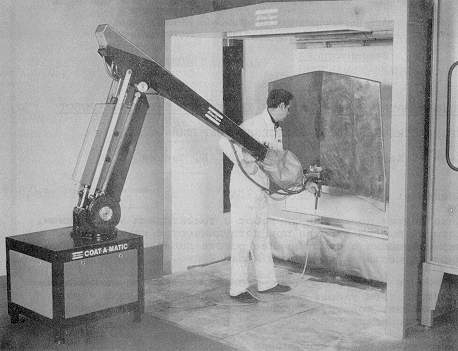
Рис.1.2. Обучение робота методом “вождения за руку” [27]
Для функционирования робота в естественной среде ему необходимо воспринимать как можно больше информации от различных датчиков. С увеличением их количества информация о среде становится полнее, но при этом развитая система знаний будет практически всегда противоречивой. Выделяют следующие источники противоречий: помехи, сбои, недостаточная точность датчиков; искажения, вносимые распознающими системами, поскольку распознавание всегда связано с аппроксимацией исходных данных; динамическая среда; неполнота описания внешнего мира. Наличие указанных противоречий затрудняет использование распознающих систем.
Появление обучаемых систем управления [58] сделало возможным появление третьего варианта обучаемых роботов – непрограммируемых, обучаемых, способных действовать в сложных, неопределенных заранее ситуациях, характеризуемых неорганизованной информацией (рис.1.1, в). Управление движениями такого робота осуществляется не программой, а окружающей его обстановкой, информация о которой снимается системой очувствления и преобразуется обучаемой системой в сигналы управления исполнительными двигателями робота в соответствии с его опытом, полученным в результате обучения. Процесс обучения данной системы аналогичен выработке условных рефлексов у животных.
Обучаемая система управления робота включает технические органы чувств (технические глаза, уши, кожу и т.д.), состоящие из рецепторов очувствления, и технический мозг, то есть преобразователь сигналов рецепторов в выходные сигналы управления. Применительно к роботу, обучаемая система управления, таким образом, является технической нервной системой. Технический мозг может быть выполнен в виде матрицы регулируемых резисторных элементов. Кроме этого система включает усилители (сумматоры-вычитатели), выходы которых являются выходами на исполнительные двигатели объекта управления, и включает устройство обучения, с помощью которого корректируются проводимости элементов резисторной матрицы.
Следует немного коснуться истории разработки технических нервных ситем. Инициатором и руководителем этих работ в Липецком политехническом институте стал доцент кафедры технологии машиностроения, к.т.н. Антонов Владимир Михайлович.
Первая его заявка по данной теме называлась “Обучаемая система управления”. Она была подана 29 августа 1985 года и зарегистрирована под номером 3949838/08 Государственным комитетом СССР по делам изобретений и открытий. Вторая заявка на изобретение “Обучаемая и самообучающаяся система управления и регулирования” (автор Антонов В.М.) подана 10 октября 1985 года и зарегистрирована под номером 3965056/08. В третьей заявке на изобретение, именуемой “Обучаемое устройство для распознавания образов” (автор Антонов В.М.), поданной 18 октября 1985 года и зарегистрированной под номером 3967683/24, и в четвертой заявке, именуемой “Обучаемая система технического зрения” (того же автора), поданной 29 октября 1985 года и зарегистрированной под номером 3971956/08, рассматривалось конкретное применение обучаемой системы с техническим зрением для управления, в частности, роботами, описывался технический глаз, имеющий сетчатку из рецепторов.
Вскоре же (4 ноября 1985 года) была подана заявка “Рецепторный датчик положения обучаемой системы управления” (авторы: Антонов В.М., Кавыгин В.В.) на которую было выдано первое авторское свидетельство.
Первые заявки утвердили отечественный приоритет в изобретении такой автоматической системы управления, у которой законы управления не разрабатываются логически, а формируются автоматически в процессе обучения. В этих заявках на изобретения произошло уточнение терминологии, были выявлены некоторые особенности обучаемых систем управления, определено их назначение и области применения.
Первый научный доклад по обучаемым системам управления Владимир Михайлович Антонов сделал 6 декабря 1985 года в Липецке на областной научно-практической конференции “Автоматизация и механизация производственных процессов” [59].
Мне довелось включиться в работу по созданию обучаемых систем управления в начале 1986 года. Результаты этой работы я постарался изложить в открытой Вами книге.
Начнем с основных принципов функционирования обучаемых систем управления (технических нервных систем).
1.2. Принципы функционирования обучаемых систем управления (технических нервных систем)
“ . . . прежде, чем можно будет построить теорию, адекватно описывающую механизмы мозга, должны быть найдены новые фундаментальные принципы”
Ф.Розенблатт
Обучаемые системы управления являются автоматическими и могут быть использованы для управления подвижными машинами, такими как роботы, металлорежущие станки, транспортные средства, – для регулирования производственных процессов на металлургических, химических и иных установках, для анализа, прогноза и диагностики, а также в режиме советчика. Они способны принимать решения на основе зрительной, слуховой, тактильной и иной образной информации, поставляемой техническими органами чувств: глазами, ушами, чувствительной кожей и прочими органами и даже такими, каких нет у живых существ. Принимаемые решения могут выражаться в форме сигналов управления приводами машин или в виде словесно-числовых выводов, заключений и рекомендаций.
Обучаемые системы управления не запоминают образы; они вообще не имеют такого пространственного накопителя информации, каким является обычный блок памяти компьютера. Технический мозг, в который направляется параллельным потоком информация от рецепторов и который выдает на выходе сигналы управления приводами, представляет собой активный преобразователь и не предназначен для документального запоминания. Нет у технического мозга также сходства с компьютерными процессорами, производящими сложные вычислительные процедуры в последовательном режиме. Поэтому быстродействие его определяется только временем прохождения сигнала, и в электрическом исполнении оно практически мгновенно.
Наиболее характерной реализацией обучаемых систем управления является аналоговый вариант. В нем информация, собираемая аналоговыми рецепторами, преобразуется аналоговым техническим мозгом и суммируется им в сигналы управления.
Аналоговый технический рецептор – это элемент (первичный преобразователь), охватывающий малый участок поля очувствления и преобразующий внешнее воздействие в непрерывный, аналоговый, изменяющийся по величине сигнал на выходе. Рецепторы очувствления образуют рецепторные поля, например сетчатку глаза или чувствительную техническую кожу. Количество рецепторов в системе не ограничено; расположение их в рецепторном поле – произвольное, неорганизованное, однако переставлять или заменять их после обучения объекта уже нельзя. Подсоединение рецепторов к техническому мозгу также может быть случайным, однако и в этом случае произвольное переподсоединение рецепторов после обучения недопустимо.
Отмеченные особенности обучаемых систем управления вытекают из их принципиального сходства с нервными системами животных, способных вырабатывать условные рефлексы.
Термин “условные рефлексы”, обозначающий явление установления функциональных взаимосвязей в нервных системах животных, введен русским ученым Иваном Петровичем Павловым. Им были выделены три главных момента, характеризующие условные рефлексы (в более широком смысле – навыки): во-первых, они возникают в результате обучения (научения); во-вторых, обучение выражается в поощрении (вознаграждении) и наказании, и, в-третьих, функциональные взаимосвязи в нервных системах носят всеохватный, ассоциативный характер, примером чего может быть возникновение связи слюновыделения у собаки со звуками шагов человека, приносящего ей корм. Условный рефлекс можно трактовать как ответное действие организма на раздражитель, подкрепленный поощрением или наказанием; раздражитель есть не что иное, как ситуация, воспринимаемая органами очувствления, а подкрепление можно понимать как воздействие обучателя, регулирующего тонус обучения [2].
Павлов Иван Петрович
(1849-1936)
Механизм возникновения условных рефлексов следующий. Вначале возникает временная связь между корковым представительством условного раздражителя (образом ситуации) и корковым представительством безусловного раздражителя, затем она закрепляется, и формируется устойчивый условный рефлекс. Существует несколько гипотез о механизмах образования устойчивой временной связи. Одна из наиболее широко распространенных – синаптическая, согласно которой, основой формирования временной связи условного рефлекса является улучшение синаптической проводимости синапсов, участвующих в передаче возбуждения.
Таким образом, обучение животных (выработка условных рефлексов) – это увязывание ситуации, воспринимаемой системой очувствления животного, с реакциями его исполнительных органов. Принципы обучения животных положены в основу процесса обучения обучаемых систем управления. Можно сказать, что основная идея разработки обучаемой системы управления – увязать напрямую текущую зрительную информацию о внешней ситуации с сигналами управления исполнительными двигателями робота, минуя процедуру распознавания образов.
Рассмотрим основные исходные положения, характерные для функционирования как живых существ, так и объектов, оснащенных обучаемыми системами управления.
Представление информации в обучаемых системах управления. В существующих автоматических системах управления в основном используется параметрическое представление информации, когда в качестве содержания информации выступают искусственно созданные наукой и техникой параметры, например скорость движения, давление, температура и т.д., образующие пространство параметров. Эти параметры являются условными и достаточно произвольными, сложившимися исторически. Так, например, если эталон массы, хранящийся во Французской академии наук, принятый за один килограмм, договориться считать равным одной тонне, то параметр, характеризующий вес любого предмета, возрастет в тысячу раз. Однако физическое воздействие предметов друг на друга от этого не изменится.
Для обучаемых систем управления важно не то, каким параметром характеризуется вес предмета, а то, какое воздействие он оказывает на рецепторы объекта управления. Поэтому в обучаемых системах используется признаковая информация [64], т.е. возбуждения рецепторов в виде, например, величины тока на выходах рецепторов, в биологии – ощущения. Если рецептор установлен на весы, то не имеет значения сколько килограммов или тонн (в принятой системе единиц) весит положенный на них предмет, а какое напряжение на выходе рецептора веса (силарецептора) будет при этом. Причем, важна не только величина этого напряжения, а и то, при каком изменении веса напряжение на выходе рецептора будет изменяться.
Для обучаемых систем не имеет значения какой параметр и в каком диапазоне отражает отдельный технический рецептор (далее – просто рецептор): температуру, освещенность или давление, – не имеет значения и нелинейность отражения параметра сигналом на выходе рецептора; важно только значение этого сигнала в каждой ситуации. Один параметр может восприниматься несколькими рецепторами; причем, каждый из них может реагировать на изменение параметра по-разному, т.е. снимаются требования по точности рецепторов, линейности зависимости выхода его от значения воздействующего на него параметра. Обучаемые системы функционируют в условиях избыточности информации.
Отказ от параметрического представления информации позволяет обезличить рецепторы: для обучаемой системы неважно, чем вызвано возбуждение конкретного рецептора, каким параметром, важна только величина возбуждения этого рецептора в данной ситуации. Рецепторы могут многократно дублировать друг друга, перекрывать диапазоны измерения друг друга, т.е. обучаемые системы могут обрабатывать избыточную информацию. Рецепторы могут быть с узким диапазоном измерения, т.е. реагировать на изменение параметра, если его значение входит в этот диапазон. При достаточном сужении интервала чувствительности
Пространство объекта с обучаемой системой управления. Обучаемые системы потребовали замены для объекта управления внешнего геометрического (искусственного, умозрительного) пространства на собственное моторное (реальное) пространство объекта.
Функционирование объекта с обучаемой системой управления происходит в моторном пространстве, которое в отличие от геометрического трехмерного пространства имеет столько же координат, сколько исполнительных двигателей у объекта управления, и координатами являются сигналы управления этими двигателями. По определению великого французского ученого А.Пуанкаре [1] “Моторное пространство – это те всем известные ощущения, которыми сопровождаются все наши движения и которые обыкновенно называют мускульными”. Применительно к нервной системе человека А.Пуанкаре отмечал: “Когда я говорю, что мы представляем себе движения, я хочу сказать, что мы представляем себе мускульные ощущения, которые сопровождают их и которые вовсе не имеют геометрического характера, а, следовательно, отнюдь не предполагают предсуществование понятия пространства”, и далее: “И пусть не говорят, что для того, чтобы представить себе движения, которые нужно совершить, их надо проектировать сначала в пространство, и что понятие пространства должно, следовательно, существовать раньше”. Кроме того, Пуанкаре утверждал, что “чувство направления – результат привычки” т.е. обучения, опыта.
Пуанкаре (Poincare) Жюль Анри
(1854-1912)
Отличие геометрического пространства от моторного хорошо иллюстрируется следующим примером. Допустим, мы держим в руке предмет, который необходимо зафиксировать в определенном положении относительно других предметов. Если предмет легкий, то для этого потребуются небольшие усилия (одни мускульные ощущения), а если взять более тяжелый предмет, то для фиксации его в том же положении потребуются более значительные усилия (другие
мускульные ощущения). Из этого примера видно, что одна и та же точка геометрического пространства (положение данного предмета относительно других) может соответствовать различным точкам моторного пространства (разным мускульным ощущениям). Время для объекта с обучаемой системой управления. Сразу отметим, что управление объектом с обучаемой системой управления происходит не во времени, а осуществляется по ситуации. Другими словами, объектом с обучаемой системой управляет воспринимаемая рецепторами окружающая ситуация. Фактор времени, как среды, в которой происходит управление, отсутствует, т.е. в этих системах нигде не заложено растянутой во времени последовательности действий (программы). Само понятие времени имеет другой смысл. Рассмотрим, что такое время с точки зрения обучаемых систем.
Рецепторы обучаемой системы фиксируют изменение какого-либо воздействия окружающей среды не с абсолютной точностью, а с некоторым интервалом нечувствительности, внутри которого изменения воздействия не ощущаются. Если изменение какого-либо воздействия хотя бы для одного рецептора выходит за пределы интервала нечувствительности, то это означает, что одна ситуация сменилась другой. Другими словами, произошло событие. Такая смена ситуаций воспринимается обучаемой системой как течение времени. Нет событий – нет и течения времени. В то же время, смена ситуаций – есть следствие движения. Время, следовательно, является результатом движения и без движения не существует.
Таким образом, неверно, что движение объекта происходит во времени. Наоборот, время можно считать следствием движения. Время для объекта с обучаемой системой управления течет постольку, поскольку изменяется окружающая или внутренняя ситуация, воздействующая на рецепторы.
Течение времени относительно для каждого объекта. Для объекта с более быстрым (по отношению к постороннему наблюдателю) изменением ситуаций, фиксируемых большим числом рецепторов системы очувствления объекта, будет и более быстрым течение времени, и наоборот. И это не кажущаяся относительность. Так оно и есть на самом деле. Недаром полностью изолированный от внешнего мира человек теряет ощущение времени, поскольку его система очувствления не фиксирует смену событий. Еще один пример отсутствия физического существования времени: элементарные частицы настолько малы, что на них ничего не может воздействовать, кроме микрочастицы того же порядка. А раз нет воздействия, то нет и течения времени. Именно поэтому устойчивые микрочастицы вечны, поскольку не разрушаются, так сказать, просто от времени (не стареют). Их разрушение происходит только при столкновении с такой же микрочастицей. Хотя, если быть точным, от времени ничего не может разрушиться. Горы разрушаются не от времени, которого не существует физически, их разрушает бесконечная цепь событий.
Для объекта неживой природы событием является такое изменение окружающей обстановки, которое приводит к изменению его структуры. Так, любое воздействие на объект, приводящее к упругим изменениям, не является для него событием, а воздействие, приводящее к пластическим изменениям, уже является событием, и вмятина на объекте является, таким образом, “печатью времени” на нем. Следовательно, структура материального объекта неживой природы является одновременно и системой очувствления его и “памятью” о всех событиях, происшедших с ним. Можно сказать, что время – всего лишь косвенная количественная мера, характеризующая число событий, зафиксированных рецепторами системы. А поскольку каждое изменение возбуждения рецептора на величину, большую интервала нечувствительности, приводит к изменению сигналов управления исполнительными двигателями, т.е. совершению какого-либо движения, то время может рассматриваться как определенная мера усталости объекта и характеризоваться количеством энергии, потраченной на совершение движений в изменяющейся обстановке не только внешней, но и внутренней – для обучаемых систем это все равно. Каждому объекту, следовательно, соответствует его собственное время.
Таким образом, управление объектом с обучаемой системой управления происходит не во времени, а осуществляется по ситуации. Однако датчики времени можно включать в систему очувствления объекта на общих основаниях с другими рецепторами для учета периодической смены каких-либо событий (качание маятника, движение стрелок и т.д.), и их показания будут учитываться при обучении и работе объекта управления.
С учетом изложенного жестко программируемые системы управления (релейная автоматика, ЧПУ и т.д.) можно рассматривать как вариант (частный случай) обучаемой системы управления с единственным датчиком времени в системе очувствления.
Роль логики и интуиции (опыта) в формировании решения. В обучаемых системах управления нет логического моделирования процесса управления объектом. Они реализуют так называемое интуитивное управление. Здесь логика и интуиция понимаются как средства принятия решения. Логика – принятие решения в результате рассуждения, интуиция – принятие решения на основе опыта, полученного в результате обучения.
Логика построена на рассмотрении на каждом шаге принятия решения только одного из факторов по принципу: “если . . . , то . . .”. В сложной ситуации последовательно перебираются все параметры, ее характеризующие, и по решающему правилу принимается решение и формируются сигналы управления исполнительными двигателями. Такой подход делает логические системы весьма ограниченными.
Логическое моделирование всегда связано с упрощением окружающей ситуации, что приводит к снижению возможностей, т.к. не учитываются некоторые менее значащие факторы ситуации, а включение в модель большего числа факторов усложняет модель и снижает быстродействие системы [19, 23].
Итак, моделирование – всего лишь попытка формализации и при этом примитивизации своего опыта. Но какой смысл в этом, если свой опыт можно непосредственно передать обучаемой системе путем ее обучения? Такая возможность давно реализована природой с появлением условных рефлексов. Логика, кстати, тоже условный рефлекс, частный случай интуиции, так же как и процедура вычисления. В частности, человеческий мозг не способен вычислять. Мы просто знаем, что “дважды два – четыре”, каждый раз это не вычисляем, нас так научили, это наш условный рефлекс. Недаром ведь в школе таблицу умножения именно зубрят, т.е. вырабатывают условные рефлексы. Мы не занимаемся вычислениями даже когда уверены в обратном. При расчетах в магазинах, кафе, транспорте мы просто набираем монеты, уже зная какую сумму они составляют – это наш условный рефлекс, а не вычисление. Более сложные вычисления – цепь условных рефлексов.
В отличие от логических систем интуитивные системы, которыми являются обучаемые системы управления, могут учитывать неограниченное число факторов одновременно, поэтому они имеют несравнимо более широкие возможности, их быстродействие гораздо выше.
Распознавание образов объектом с обучаемой системой управления. В ходе разработки обучаемых систем управления было пересмотрено отношение к процедуре распознавания образов и к его роли в системах управления.
Традиционно создание систем адаптивного управления связывалось с теорией распознавания образов: считалось, что такие системы должны собирать информацию, математически ее перерабатывать и на основании полученных результатов принимать решение и посылать сигналы управления на исполнительные двигатели объекта управления. Было разработано множество методов распознавания образов: сравнение с эталоном, сегментация, статистические методы, выделение границ и т.д. [3 – 24]. Все эти методы требуют значительных затрат времени. Однако, как отмечено в исследованиях [13], в биологических системах различение образов осуществляется сразу, а способность к распознаванию возникает в процессе длительного обучения.
В обучаемых системах управления информация поступающая через органы чувств (систему очувствления) непосредственно преобразуется в сигналы управления исполнительными двигателями, вызывая реакцию или рефлекс, т.е. какие-то движения, а по этой реакции уже может быть проведена классификация или распознавание образа, если это имеет смысл. Распознавание образов свойственно только человеку и то в очень редких случаях. Давя таракана, мы нисколько не задумываемся, что за насекомое перед нами (не проводим его распознавания). Сам вид насекомого, воспринимаемый нами, заставляет нас совершать действия в соответствии с нашим опытом. Таким образом наши действия – результат наложения ситуации на наши знания, которые являются результатом обучения (опыта) и остаются относительно неизменными.
Только натуралист, увидев таракана, начинает его распознавание (классификацию), выявляя характерные признаки и относя данное насекомое к определенному виду, подвиду, группе и т.д. При этом распознавание – следствие движений глаз натуралиста, а эти движения – следствие наличия тех или иных признаков и знаний натуралиста.
Распознавание нескольких образов – следствие решения задачи сортировки предметов. Образы двух различных предметов, преобразуясь в сигналы управления исполнительными органами робота, осуществляющего сортировку, заставляют его совершать движения, перемещая один предмет вправо, другой – влево в соответствии с обучением. После того, как предметы будут разложены, можно будет сказать, что произошло их распознавание: в одной стороне оказались, например, карандаши, а в другой, допустим, – шариковые ручки. Движениями робота, следовательно, управляли образы карандашей и шариковых ручек, воспринимаемые техническим глазом. В общем случае объектом с обучаемой системой управления управляет окружающая его обстановка в соответствии со “знаниями”, полученными системой в результате обучения.
Интересно, что, чем сложнее образ, тем легче обучить объект с обучаемой системой управления отличать его от других, так как у него больше отличительных признаков.
Обучение распознаванию одного образа среди всех возможных в принципе невозможно для обучаемых систем. Всегда можно будет найти образ, формирующий такие же сигналы управления, что и заданный, в этом отличие распознавания объектом с обучаемой системой управления от распознавания методом сравнения с эталоном (хотя и этому методу можно обучить объект с обучаемой системой управления), но в этом и сходство обучаемых систем с биологическими системами. Показав ребенку проезжающий по дороге автобус и назвав его автобусом, мы обучим его узнавать и называть автобус. Но это вовсе не означает, что ребенок отличает автобус от других транспортных средств. Первое время все, что проезжает по дороге, он называет автобусом. Теперь необходимо показать автомобиль и назвать его автомобилем, а автобус – автобусом, и после нескольких повторений ребенок начинает четко различать автобусы и автомобили. Однако, проезжающий троллейбус для него по-прежнему – “автобус”, потому что признаки его больше подходят к сформированному у него понятию “автобус”. Далее необходимо продолжить обучение на образе троллейбуса. Только после этого ребенок будет различать различные виды транспорта, что, в общем-то, не гарантирует того, что на дороге вдруг не окажется нечто такое, что и не всякий взрослый сумеет правильно классифицировать.
Обучаемые системы так же можно обучить распознавать воспринимаемые ее системой очувствления образы, т.е. обучить ее формированию выходных сигналов, которым соответствуют заранее определенные характеристики ситуаций. Это позволяет использовать обучаемые системы в качестве экспертных систем.
Таким образом, в обучаемых системах управления процедура распознавания образов, как составляющая часть акта принятия решения, отсутствует. Распознавание образов может считаться следствием принятия решения, а не его необходимым условием, т.е. оно вторично. Первичным является принятие решения или формирование сигналов управления исполнительными органами.
Схематично работу распознающих систем можно представить в виде:
![]() ,
,
а обучаемые системы управления функционируют согласно следующей схеме:
![]() .
.
Как заметил А.Пуанкаре: “Меняет ли предмет свое состояние или только положение, это передается нам всегда одним и тем же способом: изменением во всем составе впечатлений”, далее: “изменение положения отличается от изменения состояния тем, что всегда может быть компенсировано совершением движения, ставящего нас в то же относительное положение к подвижному предмету” [1]. В этих словах ученого уже показан характер распознавания объекта, который может находиться в различном положении, как результат действия (движения), что хорошо иллюстрируется поиском роботом с обучаемой системой управления со зрением заданного предмета среди прочих
[68, 73]. То, что робот нашел предмет, можно считать распознаванием этого предмета, но в этом нет особого смысла, так как необходимые действия уже совершены. 1. Автономность и обезличенность рецепторов очувствления. Этот принцип состоит в том, что каждый отдельный рецептор системы очувствления вносит свою долю в формирование выходных сигналов, независящую от состояния остальных рецепторов, т.е. для обучаемых систем пространство параметров заменено набором независимых друг от друга признаков – состояний рецепторов.
При этом необходимо учитывать, что выходной сигнал системы на исполнительный двигатель может быть как положительным, так и отрицательным, поскольку, как правило, все двигатели имеют и прямое и реверсивное (обратное) движения. Таким образом, отдельный рецептор должен вносить свою долю как в положительную так и в отрицательную составляющие выходного сигнала. Схематично это может быть показано следующим образом (рис.1.3):
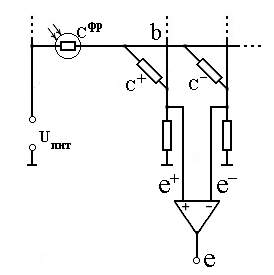
Рис.1.3. Элемент обучаемой системы управления
На схеме (рис.1.3) в качестве рецептора использован фоторезистор, изменяющий свою проводимость cфр в зависимости от освещенности, а проходящий по нему ток характеризует возбуждение b рецептора. В зависимости от соотношения проводимостей регулируемых резисторных элементов c+ и c– на входы двуполярного усилителя, выполняющего функции элемента сравнения, подаются сигналы e+ и e– . Результирующий сигнал e = kус (e+ – e–) является долей данного рецептора в общем сигнале управления исполнительным двигателем (kус – коэффициент усиления двуполярного усилителя).
Представленный элемент обучаемой системы (рис.1.3) является тем кирпичиком, из которых может быть построена система управления любым сложным объектом с любой системой очувствления.
2. Автономность исполнительных двигателей во время работы и раздельность обучения для каждого двигателя.
С учетом принципа автономности и обезличенности рецепторов данный принцип может быть реализован следующей схемой (рис.1.4):
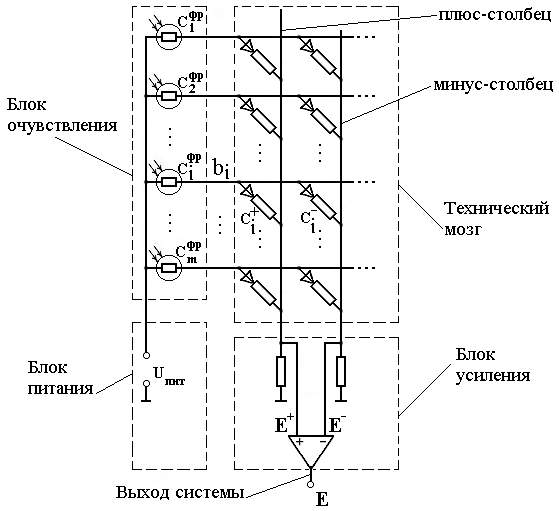
Рис.1.4. Принципиальная схема обучаемой системы управления на один исполнительный двигатель
На схеме (рис.1.4) можно выделить отдельные блоки: блок питания, блок очувствления, технический мозг в виде резисторной матрицы, в которую для исключения появления блуждающих токов введены диодные элементы, и блок усиления.
Аналогичные схемы используются для всех исполнительных двигателей объекта управления. Исходя из этого, принципиальная электрическая схема обучаемой системы управления может быть представлена в следующем виде (рис.1.5):
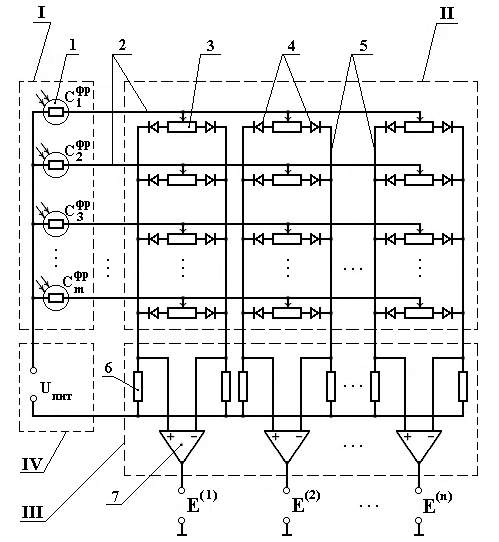
Рис.1.5.
Принципиальная схема обучаемой системы управления В этой схеме система очувставления I образована рецепторами в виде фоторезисторов 1. В качестве рецепторов 1 могут выступать элементы, изменяющие свою проводимость в зависимости от внешнего воздействия: фоторезисторы, резисторы из токопроводящей резины, микрофоны и т.д., а также активные элементы, преобразующие энергию внешнего воздействия в электрические, например фотоэлектрические элементы. Рецепторы 1 соединены строчными шинами 2 с переменными резисторами 3 матрицы II, которые играют роль технических синапсов, и через диодные элементы 4 соединены со столбцовыми шинами 5. Сумматорами сигналов плюс- и минус-столбцов 5 резисторной матрицы, соединенных через нагрузочные резисторы 6 с одной из клемм источника питания, выступают двуполярные усилители 7, образующие блок усилителей III. Другая клемма источника питания IV соединена с питающей шиной рецепторов.
Схема работы обучаемой системы управления и действия обратной связи представлены на схеме рис.1.6.
В схеме использованы следующие обозначения: ОУ – объект управления; ИД – исполнительный двигатель; СО – система очувствления; ОС – обратная связь; b – возбуждение рецептора; c – проводимость элемента преобразующей матрицы (весовой коэффициент рецептора); E – сигнал управления исполнительным двигателем; n – порядковый номер одного из исполнительных двигателей; N – общее число исполнительных двигателей.
Из схемы видно, что каждому исполнительному двигателю объекта управления соответствует своя группа весовых коэффициентов. Работа их не зависит друг от друга, а определяется только информацией, получаемой от системы очувствления.
Обратной связью в процессе работы обучаемой системы управления является изменение окружающей ситуации, воспринимаемое рецепторами системы очувствления. Возбуждения рецепторов b в некоторой ситуации преобразуются в сигналы управления E исполнительными двигателями, что приводит к движению объекта управления и связанной с ним системы очувствления, а это в свою очередь приводит к изменению возбуждений рецепторов и, соответственно, выходных сигналов управления.
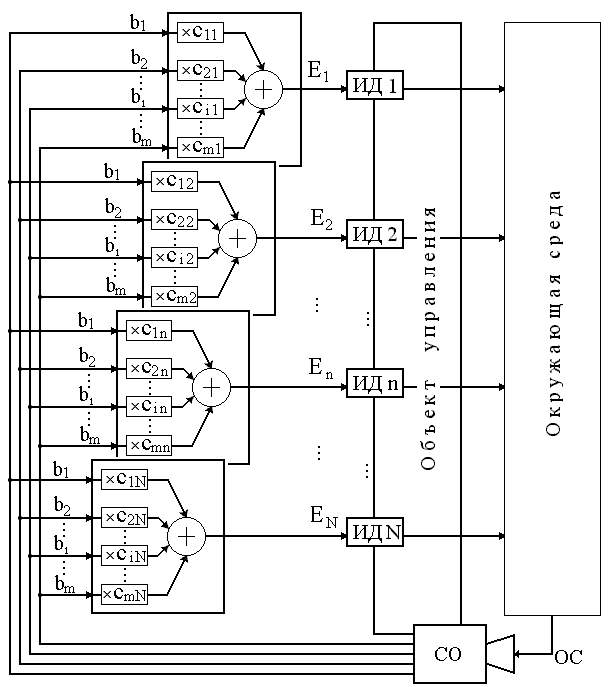
Рис.1.6. Блок-схема процесса управления обучаемой системы
3. Апостериорность обучаемых систем. Они исключают логическое моделирование процесса формирования выходных сигналов. Все взаимосвязи устанавливаются в процессе многократного обучения автоматически, аналогично выработке условных рефлексов животных. Технически это означает, что проводимости резисторных элементов матрицы технического мозга до обучения равны нулю или носят случайный характер, а после окончания обучения эти проводимости однозначно определяют значения выходных сигналов, заданных обучателем в ситуациях обучаемой выборки.
Обучение обучаемой системы управления. В данной работе рассматривается наиболее простой вариант обучения – обучение с обучателем, в обязанности которого входит определять ошибки в действиях объекта и подправлять эти действия путем корректировки проводимостей резисторных элементов матрицы технического мозга таким образом, чтобы получить требуемые выходные сигналы в данной ситуации. Поскольку рецепторы обезличены, то такая корректировка должна касаться всех рецепторов и зависеть от величины ошибки сигнала и возбуждения каждого рецептора, т.е. корректировка (изменение проводимости) резисторных элементов тем больше, чем больше возбуждение связанных с ним рецепторов. Именно такая аксиома положена в основу обучаемости обучаемых систем управления. В самом простом (идеальном) виде ее можно представить выражением:
D
сi = K · D Ej · bij ,где
D сi – изменение проводимости i–го резисторного элемента; D Ej = Ej – Ef – погрешность сигнала управления, определяемая как разность между требуемым сигналом в j-ой ситуации Ej и фактическим – Ef ; K – коэффициент пропорциональности, который характеризует степень устранения ошибки в ситуации обучения и может принимать как положительные, так и отрицательные значения.Работа обучаемой системы управления. В обученном рабочем состоянии обучаемая система выдает на выходе такой сигнал управления, который соответствует текущей ситуации. Это происходит следующим образом. Любая внешняя j-ая ситуация порождает определенный образ системы очувствления. Это означает, что в этой ситуации каждый i-ый рецептор будет иметь свое конкретное возбуждение bij и с учетом соответствующих ему проводимостей выдаст в плюс-столбец матрицы мозга свою рецепторную долю сигнала управления
![]()
а в минус-столбец – свою долю
![]()
В результате суммирования долей всех рецепторов на плюс-столбце матрицы определится общий положительный сигнал управления

а суммирование долей на минус-столбце даст общий отрицательный сигнал управления

и результирующий сигнал управления системы, формируемый сумматором-вычитателем (усилителем, выполняющим функции элемента сравнения), определится как

Выражения (1.1)…(1.5) отражают работу обучаемых систем управления применительно к одному исполнительному двигателю объекта управления, однако, согласно принципа независимости работы исполнительных двигателей, эти выражения в равной степени относятся ко всем двигателям объекта.
Сравним принципы работы обучаемых систем управления и систем управления с распознаванием образов.
1.3. Сравнительный анализ адаптивных управляющих систем управления с распознаванием образов и обучаемых систем управления
Попытки решения задачи разработки системы управления, позволяющей роботу функционировать в недетерминированной среде производства, а также действовать в человеческом обществе в реальном времени, т.е. решать задачи любой сложности с требуемым быстродействием, основывались на использовании теории распознавания образов [3 – 24]. Считалось, что такие системы должны сначала собрать информацию о ситуации, затем математически ее обработать и по результату обработки отнести эту ситуацию к какому-либо классу, т.е. распознать ее, и уже на основе результата распознавания принять соответствующее решение, применительно к роботу – сформировать и послать на исполнительные двигатели сигналы управления, обеспечивающие выполнение поставленной перед роботом задачи.
Было разработано множество различных способов и методов распознавания образов: сравнение с эталоном, сегментация, выделение границ, разметка, статистические методы распознавания, синтаксические методы и т.д. Поскольку все эти способы являются продуктом человеческого интеллекта и не существуют в живой природе, можно предположить, что таких способов может быть бесконечное множество. Данные способы требуют мощного математического обеспечения, поэтому для их реализации используется дискретная вычислительная техника.
Из множества методов распознавания образов следует выделить персептронную модель распознавания как попытку воспроизвести принципы биологических систем управления с элементами обучения [3, 4]. Эта модель характеризуется хаотичностью структуры и искусственными математическими методами обработки информации. Возможности персептронов очень ограничены, поэтому они не нашли широкого распространения. М.Минский и С.Пейперт [4] доказали принципиальную невозможность решения персептроном ряда задач, в частности он не может распознать один предмет на фоне другого. Все это заставило отказаться от персептронов и сосредоточить внимание исследователей на других способах распознавания.
Среди них можно отметить метод сегментации [22]. Смысл его состоит в автоматическом разбиении изображения на содержательно интерпретируемые области. Все эти области должны быть связанными, и разбиение должно существовать в единственном варианте. При этом каждой области присваивается своя метка.
Статистические методы [22] основываются, главным образом, на минимизации оценки ошибки классификации с помощью априорных вероятностей и плотностей распределения.
Существуют и так называемые синтаксические методы распознавания изображений [23]. При этом подходе изображение представляется предложением (конструкцией языка, которая определяется вводимой грамматикой). При описании объектов и сцен с помощью этих методов используются формальные грамматики, а процесс принятия решения представляет собой синтаксический анализ.
В последнее время активно исследуются распознающие модели с использованием нейронных сетей и методов обучения этих сетей распознаванию [43 – 52].
Из практически реализованных первых распознающих устройств можно отметить персептрон “Марк-1” Ф.Розенблатта, имевшего 20х20 фоторецепторов, 512 пороговых и 8 нейронных элементов, и созданные в Институте Кибернетики АН СССР под руководством Н.М.Амосова транспортные роботы, которые имели нейронную сеть из 200 нейронов с 2000 связей. Последнее достижение в области распознавания – так называемый нейрокомпьютер [43, 51], на разработки которого во многих странах выделяются большие средства и силы, и в основе которого лежат нейронные сети.
Схемно сильно напоминают технический мозг обучаемой системы управления так называемые линейные машины (рис.1.7) [5]. Разница между ними, прежде всего, в назначении: линейные машины предназначены для распознавания образов, представленных векторами X(x1, x2, . . . , xi, . . . , xd) , технический мозг – для преобразования выходных сигналов рецепторов в сигналы управления исполнительными двигателями объекта управления (именно такую функцию выполняет мозг в биологических системах).
Следствием различного назначения являются схемные отличия. Так, в линейных машинах число групп (R) весов W соответствуют числу R различных классов распознаваемых образов, а в обучаемых системах управления число групп весовых коэффициентов соответствует числу исполнительных двигателей объекта управления. Кроме того, выход линейной машины L0 (выход блока выбора максимума дискриминантных функций g(X)) – это код класса распознанного образа, по которому выбирается так называемый вектор управления, который затем преобразуется в сигналы управления исполнительными двигателями; для этой цели используется уже последующее устройство. Обучаемая система управления непосредственно формирует сигналы управления каждым исполнительным двигателем объекта управления, поэтому блок выбора максимума у нее отсутствует, а выходами системы являются выходы сумматоров, соответствующих исполнительным двигателям объекта. Указанные отличия – принципиальные и исходные.
Развитие обучаемых систем управления сопровождалось появлением других схемных отличий, часть из которых отражена в описаниях к авторским свидетельствам и патентам [58, 75–81].
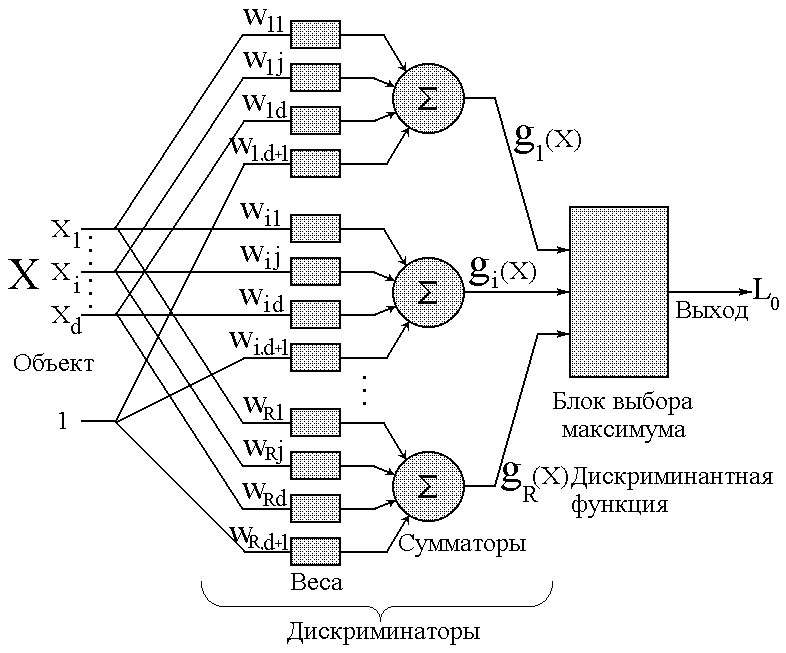
Рис.1.7. Линейная машина
Из множества методов распознавания следует выделить методы, использующие процедуру обучения. Общее понятие процедуры обучения дается, в частности, Цыпкиным Я.З. [10]: “Под обучением мы будем подразумевать процесс выработки в некоторой системе той или иной реакции на внешние сигналы путем многократных воздействий на систему и внешней корректировки”.
Однако, цели обучения распознаванию и обучения обучаемой системы управления совершенно различны. Содержательная постановка задачи обучения распознаванию образов состоит в следующем. Имеется некоторое множество наблюдений, которые относятся к p различным классам. Требуется, используя информацию об этих наблюдениях и их классификациях, найти такое правило, с помощью которого можно было бы с минимальным числом ошибок классифицировать вновь появляющиеся наблюдения [19]. Содержательная постановка задачи обучения обучаемых систем управления состоит в другом: обучить систему формировать заранее известные требуемые сигналы управления всеми исполнительными двигателями объекта управления именно в тех ситуациях, которые включены в обучаемую выборку, сформированную обучателем. Если в какой-либо другой ситуации, не входящей в обучаемую выборку, сигналы управления не устраивают обучателя, то такая ситуация включается в обучаемую выборку и производится дообучение системы.
Таким образом, в отличие от обучения распознаванию, в обучаемых системах управления реализуется обучение управлению исполнительными двигателями объекта управления.
Сами процедуры обучения рассматриваемых систем также имеют определенные отличия.
При решении задачи распознавания образов обучение в нейронных сетях осуществляется “учителем”, которым может быть система, указывающая на правильность или ошибочность реакции и назначающая поощрение или штраф за функционирование [20]. Такая процедура определяется тем, что оценка результата распознавания может быть одной из двух: “верно” или “неверно”. Если “верно”, то назначается поощрение, если “неверно” – наказание. К обучаемым системам управления подход другой: здесь важно, насколько выходной сигнал управления отличается от требуемого, поэтому обучение таких систем заключается в корректировке (поправке) весовых коэффициентов пропорционально возбуждениям их рецепторов таким образом, чтобы получить требуемые сигналы управления.
Для обучаемых систем управления, как и “во всех задачах распознавания образов предполагается, что для обучения собран материал – обучающая последовательность, т.е. некоторая совокупность образов или реализаций процесса, классификация которых достоверно известна” [19]. Только в случае обучаемых систем управления речь идет не о классификации образов (для них это не имеет никакого значения), а о величинах сигналов управления исполнительными двигателями в этих ситуациях. Кроме того, как будет показано в данной работе, есть возможность обучать систему управления так называемым “вождением за руку” или “натаскиванием”, т.е. без формирования обучаемой выборки.
Далее при обучении распознаванию образов было отмечено, что “скорость обучения существенно зависит от порядка предъявления векторов. Обычно лучший результат достигается при предъявлении представителей различных классов вперемежку” [12]. Вопрос зависимости продолжительности обучения системы управления от порядка предъявления ситуаций, является предметом исследований и в данной работе. Будет показано, что продолжительность обучения значительно снижается, если на каждом шаге обучения предъявлять ситуацию, в которой ошибка сигнала управления – наибольшая.
В отличие от обучения распознаванию образов, для которого “основой для построения оценок при обучении и самообучении служат методы классической статистики” [7], обучение и работа обучаемых систем управления не носят вероятностный характер.
Сложной проблемой обучения распознаванию образов является выделение так называемых значимых признаков: “главным препятствием при практическом распознавании образов является наличие мешающих параметров в необработанных данных. Снижение размерности и преобразование колебаний или изображения в вектор признаков образа или вектора данных в вектор признаков исключает мешающие параметры при “правильном” его применении” [7]. “Процедуры восстановления зависимостей (обучение распознаванию образов) строят по обучающей последовательности функцию, реализующую правило распознавания. Такая функция называется также решающим правилом. Попутно может выясниться, что ряд параметров несущественен для распознавания. Тогда будет выделено подмножество значимых признаков. Только они и берутся в качестве аргументов решающего правила” [19].
Для обучаемых систем управления наличие мешающих или незначимых признаков никак не сказывается на обучении и работе. Кроме того, при распознавании чрезмерно большая емкость класса решающих правил при ограниченном объеме обучающей последовательности недопустима, и поэтому возникает проблема оптимального разбиения на градации непрерывных признаков [19].
Для обучаемых систем, наоборот, увеличение числа градаций увеличивает степень отличия ситуаций, что ускоряет обучение и повышает точность работы этих систем.
Подытоживая, можно отметить следующее. Поскольку методы распознавания громоздки, большое число учитываемых факторов затрудняет математическую обработку информации. При этом следует помнить, что, чем меньше факторов используется при распознавании, тем хуже работа устройства, т.к. увеличивается риск принятия неверного решения в ситуации, когда информация о ней слишком неполная. Чем сложнее задача, тем ниже быстродействие распознающей системы. До сих пор отсутствуют эффективные алгоритмы анализа сложных изображений, а также методы четкого выделения информативных признаков и методики выбора алгоритма для решения конкретной задачи. Кроме этого, при анализе изображений приходится обрабатывать большие объемы информации, и вследствие этого существенно сократить время обработки пока не удается [23].
Обучаемые системы управления не используют процедуру распознавания, а работают на иных принципах. В этих системах информация, поступающая на рецепторы очувствления, проходя через резисторную матрицу, как через своеобразный преобразующий фильтр, непосредственно поступает на исполнительные двигатели в качестве сигналов управления. Проводимость же элементов матрицы формируется многократным обучением. Таким образом, исследуемые в данной работе системы являются обучаемыми системами управления в отличие от обучаемых систем распознавания образов. Если обучаемые системы управления воспринимают зрительную информацию, то они являются системами управляющего зрения в отличие от систем технического зрения, распознающих зрительные образы.
Сравнение процедур управления с использованием систем распознавания образов и обучаемых систем управления представлено на рис.1.8. В рисунке использованы следующие обозначения: ОУ – объект управления (транспортная тележка); СТЗ – система технического зрения; ВК – видеокамера; УРО – устройство распознавания образов; УУ – устройство управления; X, Y, Z – геометрические координаты; ТГ – технический глаз; УП – устройство преобразования сигналов рецепторов в сигналы управления; ОСУ (СУЗ) – обучаемая система управления (система управляющего зрения).
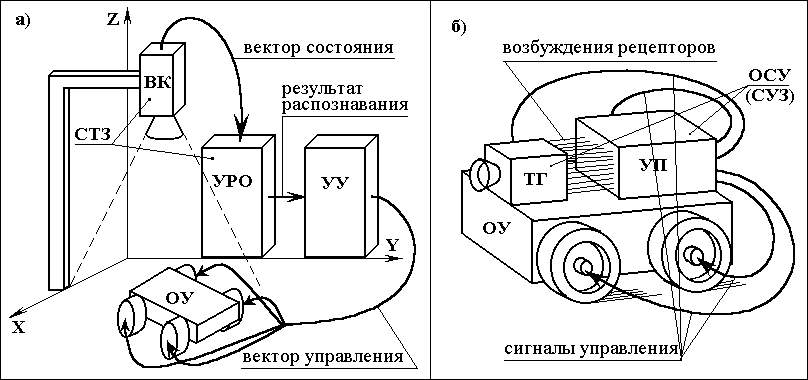
Рис.1.8. Схема процедуры управления:
а) системой управления с распознаванием образов;
б) обучаемой системой управления
Из представленных схем видно, что в процессе управления обучаемой системой (рис.1.8,б) отсутствуют процедура распознавания и процедура формирования вектора управления, который затем раскладывается на сигналы управления исполнительными двигателями, и каждая процедура требует значительных временных затрат, что ограничивает быстродействие системы [24]. В обучаемых системах таких потерь времени нет, здесь сигналы рецепторов технического глаза сразу преобразуются в сигналы управления исполнительными двигателями.
В заключение следует отметить: при попытках создания систем, работающих по принципу мозга, была нарушена поэтапность исследований, т.к. сразу делались попытки смоделировать мозг человека. Как заметил Ф.Уоссерман: “Структура искусственных нейронных сетей была смоделирована как результат изучения человеческого (выделено автором этой книги) мозга” [51]. В частности, задача распознавания образов, другими словами – классификация (отнесение конкретной книги к классу “книги”, конкретного стула – к классу “стулья”), является абстрактной задачей, т.к. предполагает наличие абстрактных понятий – классов образов, таких как, например, “круги”, “квадраты”, “треугольники”, “столы”, “книги” и т.д. и т.д. Решение подобных задач свойственно только человеку, животные же абстрактными понятиями не оперируют! “Для простейшего животного задача нервной системы состоит в том, чтобы преобразовать ощущения, вызываемые внешним миром, в определенную двигательную активность” [40], именно такую задачу на данном этапе и решают обучаемые системы управления, при этом процедура распознавания образов, как необходимое условие формирования сигналов управления, не используется.
1.4. Анализ вопросов аппаратной реализации систем управления роботами
Вопросы аппаратной реализации обучаемых систем управления являются актуальными. Сложность процедуры распознавания определяет необходимость использования высокопроизводительной дискретной вычислительной техники в системах распознавания. Однако, вопрос: цифра или аналог? – не снят с повестки дня. Оценивая перспективы развития систем, моделирующих работу мозга, д.ф.-м.н. А.С.Михайлов (МГУ) считает, что мозг “работает как колоссальная “аналоговая” машина” и утверждает: “устройство, условно именуемое биокомпьютером, будет не цифровым вычислительным, а универсально аналоговым” [40].
Если говорить об особенностях цифровых и аналоговых систем, то следует отметить, что цифровые системы предельно универсальны. Во-первых, с помощью системы цифровых элементов может быть решена любая хорошо формализованная задача. Во-вторых, характеристика хорошо спроектированного и изготовленного цифрового элемента строго определена независимо от физического принципа его действия.
Для аналоговых элементов справедливо прямо противоположное утверждение: каждая аналоговая система специализирована для решения информационных задач определенного класса. Точность и надежность аналоговых систем также сильно уступает цифровым. Однако, если класс задач жестко определен, быстродействие аналоговой системы может на много порядков превышать быстродействие цифровых, причем их физическая структура и технология могут быть несравнимо проще цифрового “конкурента” [33].
Следует отметить, что обучаемые системы управления могут быть реализованы как с использованием дискретной вычислительной техники, так и в аналоговом варианте. Причем аналоговый вариант наглядно демонстрирует принципы работы этих систем – трудно говорить о работе устройства, оперируя только наборами чисел. Стоимость же аналоговой системы существенно ниже цифровой.
Особенностью управления роботом с помощью цифровых систем является формирование управляющих сигналов приводов за некоторый фиксированный промежуток времени – такт управления. Величина последнего оказывается критичной не только для величины динамической ошибки, но и для решения вопросов устойчивости системы [24].
Напротив, аналоговая обучаемая система управления непрерывно формирует выходные управляющие сигналы для всех приводов робота. При этом преобразование сигналов рецепторов системы очувствления в сигналы управления исполнительными двигателями в таких системах происходит мгновенно, поскольку сам преобразователь представляет собой обычную резисторную матрицу.
Следует особо остановиться на видеодатчиках систем управления со зрением. В современных системах технического зрения наибольшее распространение получили телевизионные датчики на основе приборов с зарядовой связью. Изменение яркости и накопление электрического заряда в них происходит параллельно в течение значительного времени, равного обычно одному телевизионному кадру. Затем результаты измерений считываются последовательно в процессе развертки и формируют обычный видеосигнал. По мере роста быстродействия вычислительных машин именно видеодатчик стал здесь самым узким местом в смысле потерь времени на обработку сигналов. Определенные надежды на увеличение быстродействия возлагались на видеодатчики параллельного типа, похожие на сетчатку живых органов зрения. Применительно к таким датчикам разрабатывались “параллельные” методы сегментации, в которых предполагалось построение специальной вычислительной среды, состоящей из многих последовательных слоев. Однако считается, что технологические трудности, стоящие на пути таких распознающих систем, пока не преодолены, и применение видеодатчиков такого типа будет делом будущего [34].
Напротив, структура обучаемой системы управления позволяет реализовать (и реализует) видеодатчик параллельного типа, которым является сетчатка технического глаза и быстродействие которого определяется только инерционностью его фоторецепторов (фоторезисторов) [58, 75 – 81].
| Site of Information
Technologies Designed by inftech@webservis.ru. |
|