Каждый из приведенных ниже вариантов разработанных схем обучаемых систем управления решает серьезные проблемы, которые возникали в процессе исследования этих систем, и является определенным этапом в работе и новым техническим решением, выводившем на более высокий уровень понимания принципов работы обучаемых систем, поэтому эти схемы приобрели форму изобретений, защищенных авторскими свидетельствами и патентами.
3.1. Командные рецепторы обучаемой
системы управления В процессе сборки узлов возникает необходимость последовательного поиска собираемых деталей. Классическую обучаемую систему управления можно обучить искать несколько предметов. Но как задать требуемую последовательность поиска?
Для решения этой задачи возникла идея так называемых командных рецепторов [77], включение каждого из которых определяет поиск необходимой в данный момент цели. Но при этом возникла новая проблема: командные рецепторы не реагируют на изменение освещенности, и, следовательно, при ее изменении сигнал управления двигателя, определяющего движение поиска, в целевой ситуации отклонялся от нулевого значения за пределы допуска, т.е. поиск становился невозможным. Было предложено соединить командные рецепторы с источником питания через рецептор освещенности. Следует отметить, что идея командных рецепторов не была заимствована у природы, и в дальнейшем было найдено более интересное решение, позволяющее обучать объект управления различным задачам, но для практического обучения реальной обучаемой системы командные рецепторы оказались очень удобными, т.к. позволяют легко дообучать и корректировать ошибки обучения изменением долей сигналов только таких командных рецепторов, не затрагивая другие рецепторы.
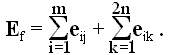
На рис.3.1 представлена электрическая схема такой обучаемой системы управления. Система содержит сетчатку технического глаза 1 (оптика технического глаза на схеме не показана), состоящую из набора рецепторов очувствления в виде фоторезисторов 2; технический мозг 3 в виде матрицы аналоговых резисторных элементов 4, соединенных строчными шинами 5 с фоторезисторами 2 сетчатки глаза, а парными столбцовыми шинами 6 и 7 с нагрузочными резисторами 10; набор усилителей 8, содержащий двуполярные усилители 9, входы которых соединены с парными столбцовыми шинами 6 и 7, а выходы 11 которых являются выходами системы. Кроме того, система включает набор 12, содержащий три группы командных рецепторов, каждый из которых состоит из последовательно соединенных электрического контакта 13 и переменного резистора 1
4. Электрические контакты 13 одной из групп командных рецепторов выполнены в виде выключателей с ручным управлением; управляющие входы электрических контактов 13 другой группы предназначены для подключения к внешним системам, и, наконец, управляющие входы электрических контактов 13 третьей группы подключены к выходам пороговых элементов 15, установленных на выходах 11 части усилителей 9. В системе имеется источник питающего напряжения постоянного тока 16. С одной клеммой этого источника соединены рецепторы очувствления 2, а с другой клеммой соединены нагрузочные резисторы 10. Командные рецепторы соединены строчными шинами 5 с аналоговыми резисторными элементами 4 матрицы мозга 3 и с источником питающего напряжения 16 через фоторезистор 17, оптически направленный на поле зрения технического глаза, минуя объектив этого глаза. Рецепторы очувствления и командные рецепторы соединены со строчными шинами 5 технического мозга разъемами 18. Технический мозг включает еще дополнительные строчные шины (на схеме не указаны), совмещенные с выходами 11 системы.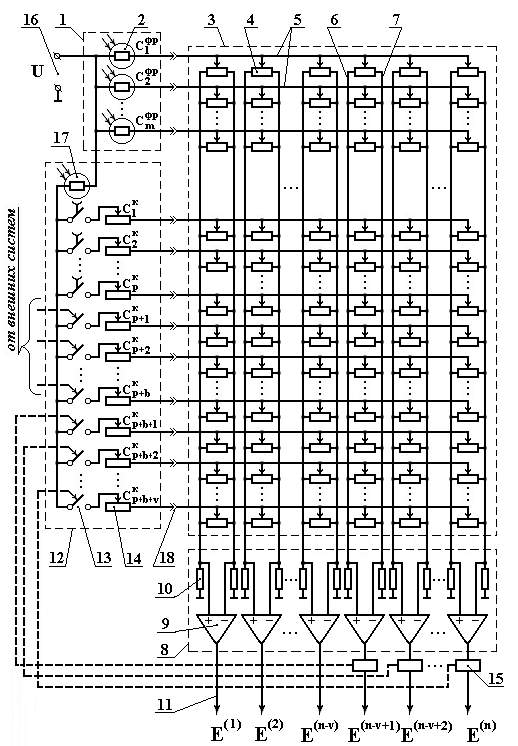
На схеме указаны обозначения: С
1фр, С2фр, . . . , Сmфр – проводимости фоторезисторов 2 сетчатки технического глаза; индекс внизу обозначает порядковый номер фоторезистора, m – общее количество фоторезисторов сетчатки; С1к, С2к, . . . , Срк – проводимости переменных резисторов 14 командных рецепторов, электрические контакты 13 которых выполнены в виде выключателей, замыкаемых или размыкаемых вручную человеком; р – общее количество таких командных рецепторов; Ср+1к, Ср+2к, . . . , Ср+вк – проводимости переменных резисторов 14 командных рецепторов, замыкание и размыкание электрических контактов 13 которых осуществляется внешними управляющими системами, например системой управления металлорежущего станка, который обслуживается промышленным роботом, оснащенным обучаемой системой управляющего зрения; в – общее количество командных рецепторов, электрические контакты которых замыкаются и размыкаются внешними управляющими системами; Ср+в+1к, Ср+в+2к, . . . , Сvк – проводимости переменных резисторов 14 командных рецепторов, замыкание и размыкание электрических контактов 13 которых осуществляется пороговыми элементами 15 обучаемой системы управляющего зрения; v– общее количество таких командных рецепторов; w = p + b + v – общее количество командных рецепторов; n – общее число исполнительных органов объекта управления и пороговых элементов 15; (n – w) – общее количество исполнительных органов объекта управления; E(1), E(2), . . . , E(n–v) – сигналы управления исполнительными органами объекта управления (индекс вверху обозначает порядковый номер исполнительного органа); E(n–v+1), E(n–v+2), . . . , E(n) – сигналы управления пороговыми элементами 15, замыкающими и размыкающими электрические контакты 13 командных рецепторов; U – напряжение источника питающего напряжения 16. Пороговые элементы 15 срабатывают при определенных уровнях сигналов управления Е на соответствующих выходах усилителей 9, замыкая или размыкая электрические контакты 13 командных рецепторов. Соотношение электрических сопротивлений фоторезисторов 2, резисторов потенциометров 4 и нагрузочных резисторов 10 должно быть таким, чтобы исключить появление блуждающих токов в обучаемой системе управления.
Число различных задач, решению которых можно обучать робот, оснащенный данной системой, определяется числом возможных комбинаций включений командных рецепторов. Число таких комбинаций будет равным:
N
k = 2w . Прежде, чем включить обучаемую систему управления в работу, ее необходимо обучить т.е. настроить. Рассмотрим процесс обучения на примере настройки системы, установленной на промышленном роботе, предназначенном для поиска заданных предметов сложного внешнего вида, произвольно расположенных в рабочей зоне робота. Решение этой задачи необходимо в процессе, например, сборки узлов, когда в рабочую зону робота поступает комплект различных деталей, сориентированных произвольно, и которые в определенной последовательности должны быть собраны в узел.
Технический глаз установлен на схвате робота и совмещен с осью вращения схвата. Движения поиска осуществляют три двигателя: первый – перемещает схват с установленным на нем глазом вдоль стола с размещенными на нем различными предметами; второй – перемещает схват поперек стола; третий – вращает схват вокруг оси. Была поставлена цель – обучить робот при замыкании электрического контакта 13 первого командного рецептора искать первый заданный предмет, при замыкании контакта 13 второго командного рецептора – искать второй заданный предмет и т.д. по числу искомых предметов. При замыкании контакта 13 одного из командных рецепторов контакты остальных автоматически размыкаются. Возможны и другие комбинации включений и выключений контактов 13 командных рецепторов.
Сначала необходимо определить стратегию поведения робота. Тот его двигатель, который перемещает схват и установленный на нем глаз вдоль стола с размещенными на нем предметами, должен работать в заданном направлении в тех случаях, когда в поле зрения глаза либо нет предметов, либо есть, но – посторонние, и должен остановиться в том случае, когда в поле зрения находится правильно ориентированный искомый предмет. Другой двигатель, смещающий схват поперек стола, должен работать таким образом, чтобы любой предмет располагался по центру поля зрения глаза в поперечном направлении. Третий двигатель должен вращать схват в ту или иную сторону в зависимости от перекоса предмета в поле зрения, и, если предмет находится в заданном положении, третий двигатель должен остановиться. Схват должен сработать только в том случае, если в поле зрения будет располагаться правильно сориентированный искомый предмет. Какой предмет является искомым в данный момент, определяется замыканием контактов 13 командных рецепторов.
Установленный на схвате робота технический глаз имеет сетчатку из фоторезисторов 2, расположение которых произвольное. Предварительно пронумеруем все фоторезисторы 2 и им соответствующие строки 5 матрицы технического мозга. Изображение рабочей зоны проецируется на сетчатку с помощью объектива. Перед началом обучения все скользящие контакты потенциометров 4 необходимо выставить в среднее положение. Далее устанавливают проводимости переменных резисторов 14 командных рецепторов в зависимости от заданной последовательности поиска предметов, определяемой, например, последовательностью сборки узла. В процессе сборки предметы (детали) поочередно удаляются из рабочей зоны робота и устанавливаются в собираемый узел. Наибольшую проводимость резистора 14 устанавливают для командного рецептора, задающего команду на поиск первого предмета. Для поиска второго предмета проводимость резистора 14 соответствующего командного рецептора устанавливают меньше; для третьего – еще меньше и т.д. Наименьшая проводимость резистора 14 устанавливается для командного рецептора, определяющего поиск последнего предмета. Такой порядок установки проводимостей резисторов 14 командных рецепторов обеспечивает по мере удаления предметов из рабочей зоны остановку схвата только на том предмете, который задан последовательностью сборки, и прохождение схвата над всеми оставшимися предметами, если те будут попадать в поле зрения глаза.
Обучение проводят отдельно для каждого двигателя и одновременно для всех задач по поиску предметов. Обучение можно начать с первого двигателя, управление которым осуществляет первая пара столбцов 6 и 7 матрицы 3 с сигналом Е
На следующем этапе обучения производят расчеты долей eоi сигнала управления каждого i-го рецептора, которые формируются на выходе 11 усилителя 9 первой пары столбцовых шин 6 и 7 в опорной ситуации. Для формирования опорной ситуации используют одну из целевых, например вторую ситуацию первой задачи и замыкают электрические контакты 13 всех командных рецепторов. Порядок расчета предусматривает поочередное предъявление ситуаций обучаемой выборки и поочередный расчет долей сигнала управления eоi в опорной ситуации. Расчет – итерационный и повторяется до тех пор, пока ошибка сигнала управления D
Еj(1) в каждой j-ой ситуации обучаемой выборки не окажется меньше допустимого отклонения dj(1). Исходные значения долей eоi сигнала управления принимают равными нулю. Порядок расчета соответствует описанному в разделе 2.2.4.
Следующий этап обучения – настройка потенциометров 4 технического мозга. Для этого подсоединяют к строчным шинам 5 все отсоединенные ранее рецепторы очувствления 2 и командные рецепторы и замыкают электрические контакты 13 всех командных рецепторов. Во время настройки все выходы 11 усилителей 9 должны быть отключены от двигателей и пороговых элементов 15. Настройку ведут в ситуации, принятой за опорную, для чего глаз выставляют в положение, когда он видит сориентированный первый искомый предмет, и замыкают контакты всех командных рецепторов. Настройка заключается в смещении скользящего контакта каждого потенциометра 4 в ту сторону и на такую величину, которые обеспечивали бы изменение сигнала управления Е(1) на выходе первого усилителя на расчетную величину eоi соответствующего i-го рецептора. Например, согласно расчету доля в сигнале управления первого рецептора равна 0,12 В (eо1 =+12 В), следовательно, нужно сместить скользящий контакт первого потенциометра 4 первой пары столбцовых шин в ту сторону и настолько, чтобы при этом измеряемый с помощью вольтметра сигнал управления Е(1) на выходе первого усилителя увеличился на величину 0,12 В. После этого переходят к следующему потенциометру 4 той же пары столбцовых шин, и, если, согласно расчету, например eо2=–0,08 В, то скользящий контакт второго потенциометра 4 смещают в обратную сторону настолько, чтобы сигнал управления Е(1) уменьшился на 0,08 В.
После настройки всех потенциометров 4 первой пары столбцовых шин технического мозга проводят проверку настройки. Для этого в той же ситуации, которая использовалась для формирования опорной, но при замкнутом контакте 13 только первого командного рецептора, измеряют на выходе первого усилителя сигнал управления, который должен быть равен нулю: Е(1) = 0 – в пределах заданного допуска. Во всех прочих ситуациях обучаемой выборки сигнал должен быть положительным. Равным нулю он должен быть и в ситуации, когда глаз видит сориентированный второй искомый предмет при замкнутом контакте 13 только второго командного рецептора. При замкнутом контакте 13 только третьего командного рецептора нулевым сигнал должен быть в ситуации, когда глаз видит сориентированный третий искомый предмет. И так далее. Таким образом подтверждается правильность обучения.
После завершения настройки потенциометров 4 первой пары столбцовых шин 6 и 7, т.е. после обучения первого двигателя, переходят к обучению второго двигателя, руководствуясь при этом принятой стратегией поведения робота и той же методикой, которая применялась при обучении первого двигателя.
Пороговые элементы 15 обучают по подобной методике. Они могут использоваться для переключения контактов 13 командных рецепторов в случае перехода к выполнению очередной задачи, а также для управления работой схвата. Условием срабатывания порогового элемента 15 может быть целевая ситуация, когда в поле зрения располагается найденный предмет и его требуется захватить с помощью схвата и перейти к решению следующей задачи. Для управления работой пороговых элементов может использоваться как отдельная пара столбцовых шин технического мозга, так и пара уже задействованных для управления одним из двигателей. В первом случае необходимо настроить потенциометры 4 отдельной пары столбцовых шин таким образом, чтобы в ситуациях, когда требуется срабатывание пороговых элементов, на выходе 11 соответствующего усилителя 9 была необходимая для срабатывания величина сигнала управления, а во втором случае требуется подобрать или настроить пороговый элемент таким образом, чтобы срабатывание его в целевых ситуациях определялось величиной сигнала управления соответствующего двигателя.
Работает обучаемая система управления следующим образом. После завершения обучения система подсоединяется к объекту управления и на нее подается напряжение U от источника питающего напряжения постоянного тока 16. При этом каждый рецептор очувствления 2 и включенный командный рецептор в текущей j-ой ситуации выдает на выход 11 свою долю eij сигнала управления Ej, определяемую его проводимостью в этой ситуации Сijфр или Сijк и смещением скользящего контакта соответствующего ему потенциометра 4. В результате фактический сигнал управления Efj определится как сумма долей от всех рецепторов:
Если теперь замкнуть контакт 13 первого командного рецептора, то на выходе 11 первого усилителя 9 сформируется сигнал управления Е
(1), соответствующий тому, что попадает в поле зрения технического глаза, т.е. этот сигнал будет равен нулю в тех случаях, когда в поле зрения глаза окажется первый искомый предмет с заданной ориентацией, и будет положительным, если в поле зрения находятся другие предметы или фон. Следовательно, первый двигатель робота будет смещать схват с глазом вдоль стола до тех пор, пока глаз не увидит искомый предмет, и только при этом остановится. Действия первого двигателя будут успешными, так как контрольная проверка сигналов управления первого усилителя 9 после обучения подтвердила, что сигналы управления будут равны нулю в целевых ситуациях и будут положительными в остальных. Такими же успешными окажутся действия второго и третьего двигателей, если обучение проведено правильно. Как видно из стратегии обучения, второй и третий двигатели робота смещают и поворачивают глаз так, чтобы искомый предмет оказался правильно сориентированным в поле зрения глаза вне зависимости от его положения на столе. Таким образом, все двигатели робота, действуя согласованно, обеспечивают поиск заданного предмета. Если же замкнуть контакт 13 второго командного рецептора, то будет осуществлен поиск второго заданного предмета. При замкнутом контакте 13 третьего командного рецептора осуществится поиск третьего предмета. И так далее. Электрические контакты 13 командных рецепторов могут быть разделены по управлению ими на три группы. Контакты одной из групп являются выключателями, замыкает и размыкает которые вручную человек. Управляющие входы контактов другой группы предназначены для подключения к внешним системам. Это могут быть системы управления другими объектами, системы управления других уровней и т.д. Управляющие входы контактов третьей группы подключены к выходам пороговых элементов 15, через которые замыкание или размыкание контактов этой группы осуществляет конкретная зрительная ситуация, воспринимаемая техническим глазом.
Поиск заданных предметов будет обеспечен в условиях изменяющейся освещенности благодаря наличию фоторезистора 17, оптически направленного на поле зрения технического глаза, минуя объектив, и соединяющего командные рецепторы с источником питания. Это следует из выражения для определения фактического сигнала управления, если ввести в него коэффициент
из которого следует, что при любом значении
h в целевых ситуациях сигнал управления будет равен нулю, т.е. поиск предметов гарантирован. Что же касается скорости движений при поиске, то очевидно, что при большей освещенности она будет больше, при меньшей – меньше. При слабом освещении движения робота будут замедленными, при ярком освещении – ускоренными.
3.2. Обучаемая система управления с
внутренними обратными связями Изложенное в этом разделе изобретение [78] имеет важное теоретическое и практическое значение. Оно позволяет обучать систему выполнению последовательности действий, когда выполнение одного действия (точнее, формирование управляющего сигнала) вызвано выполнением предыдущего (предыдущим управляющим сигналом) и в свою очередь является причиной последующего действия объекта управления (последующего сигнала управления). При отключенных исполнительных органах таким образом реализуется процесс мышления технической нервной системы. Изобретение позволяет согласовывать управляющие сигналы исполнительными двигателями между собой.
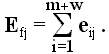
На рис.3.2 представлена схема такой обучаемой системы управления (внешне она напоминает так называемые нейронные сети Хопфилда). Она содержит технические органы чувств 1, состоящие из наборов рецепторов очувствления 2, постоянное запоминающее устройство 3 в виде матрицы аналоговых резисторных элементов 4, строчные шины 5 которой совмещены с рецепторами очувствления 2, а столбцо вые шины 6
На схеме указаны обозначения:
U – напряжение источника питания 12; b1р, b2р,..., bmр – токи, проходящие через фоторезисторы 2 и определяемые сопротивлениями этих резисторов (индекс внизу обозначает порядковый номер рецептора); m – общее количество рецепторов очувствления; Е(1), Е(2), . . . , Е(n) – сигналы управления исполнительными органами объекта управления (на схеме исполнительные органы не показаны) (индекс вверху обозначает порядковый номер исполнительного органа); n – общее количество исполнительных органов; b11M, b12M,..., bn1M, bn2M – токи, проходящие по каналам обратных связей, определяемые величинами сигналов управления Е и сопротивлениями потенциометров 4 (первый индекс внизу обозначает номер соответствующего исполнительного органа, второй индекс внизу обозначает номер канала в паре каналов обратных связей). Рассмотрим процесс обучения данной системы. Допустим, обучаемая система управления установлена на промышленном роботе, и обучим этот робот поиску заданного предмета среди посторонних. В качестве органа чувств в данном случае используем технический глаз, установленный на схвате робота. Сначала необходимо определить стратегию поведения робота. Если предметы, среди которых находится искомый, расположены на столе, то поиск можно организовать так, что рука робота с глазом будет перемещаться вдоль стола на определенной высоте и смещаться поперек стола только в том случае, если в поле зрения глаза попал любой предмет. Смещение поперек стола должно быть всегда в сторону попавшего в поле зрения предмета. Если предмет повернут, то схват с глазом должен при поиске повернуться так, чтобы искомый предмет оказался правильно сориентированным в поле зрения глаза.
Определим более подробно действия двигателей робота. Тот его двигатель, который перемещает схват и установленный на нем глаз вдоль стола с размещенными на нем различными предметами, должен работать в заданном направлении в тех случаях, когда в поле зрения глаза либо нет предметов, либо есть, но посторонние, и должен остановиться в том случае, когда в поле зрения – сориентированный искомый предмет. Другой двигатель, смещающий схват поперек стола, должен работать в том направлении, с какой стороны в поле зрения глаза попал край любого предмета, и должен остановиться в том случае, если предмет находится в центре поля зрения. Третий двигатель должен вращать схват в ту или иную сторону в зависимости от направления отклонения условной оси предмета относительно условной оси поля зрения глаза; но если искомый предмет находится в заданном положении, то двигатель должен остановиться. Обучение проводят отдельно для каждого двигателя, а затем согласуют совместные действия всех двигателей.
Предварительно пронумеруем все фоторезисторы 2 сетчатки глаза и соответствующие им строки 5 матрицы постоянного запоминающего устройства 3. Расположение фоторезисторов на сетчатке и их нумерация – произвольные. Обучение можно начать с первого двигателя, управление которым осуществляет, допустим, первая пара столбцов 6 и 7 матрицы 3 с сигналом управления Е
Если правильно была составлена обучаемая выборка по всем двигателям, то их действия окажутся целенаправленными и согласованными, т.е. схват с глазом будет перемещаться вдоль стола, притормаживать и быстро смещаться в сторону предмета, попавшего в поле зрения глаза, разворачиваться до совпадения условной оси искомого предмета с условной осью поля зрения и останавливаться в том случае, если в центре поля зрения окажется правильно сориентированный искомый предмет. Посторонние предметы схват будет проходить, не останавливаясь.
Наличие блоков задержки 16 в каналах внутренних обратных связей 14 позволяет, во-первых, учесть различную инерционность исполнительных органов (изменение скорости двигателя всегда отстает во времени от изменения сигнала управления), а во-вторых, согласовать действия исполнительных органов при неизменной ситуации, воспринимаемой органами чувств. Поясним последнее утверждение примером. Допустим, робот обслуживает станок-полуавтомат, и на время отсутствия заготовок отключают станок полностью. Как только в поле зрения глаза робота появилась требуемая заготовка (только что ее подвезли), то обучаемая система управления, не меняя положения схвата робота, может сначала подключить для предварительного прогрева электронику, затем включить станок, потом подать смазывающе-охлаждающую жидкость и только после этого приступить к управлению роботом.
Временная задержка сигналов в каналах обратной связи 14 с помощью блоков задержки 16 позволяет растянуть процесс согласования сигналов Е (мышления) на некоторое время. Без указанной задержки процесс согласования затухал бы практически мгновенно. При решении сложных задач, потребуется многоходовой перебор ситуаций согласования и, следовательно, необходимость в блоках задержки 16.
Таким образом, введение в обучаемую систему управления дополнительного блока 13 постоянного запоминающего устройства и блока внутренних обратных связей 15 расширяет функциональные возможности системы путем введения взаимовлияния сигналов управления на выходах усилителей.
3.3. Деление рецепторов обучаемой системы
управления на группыВ процессе экспериментального изучения возможностей обучения робота ТУР-10К с технической нервной системой решению сложных задач и во время теоретических исследований возникла проблема: как обучить робот переключению на решение задач, противоположных по своим целям, например переключению с задачи поиска на задачу уклонения? Как часто бывает в таких случаях, обратились за советом к природе. Было высказано предположение, что рецепторы очувствления животных и человека разделены на группы, а переключение с одной задачи на другую осуществляется переключением внимания от информации одной группы рецепторов на информацию от другой. В качестве иллюстрации можно привести следующий пример. Когда водитель управляет автомобилем, он руководствуется в основном информацией, получаемой от органов зрения, но появление звуков, нехарактерных для нормальной работы двигателя, заставляет водителя переключиться на слуховую информацию и на выполнение новой задачи – поиска неисправности двигателя. Идея разделения рецепторов на группы была оформлена в виде заявки на
изобретение, на которую был получен патент [79]. Описание изобретения приведено ниже.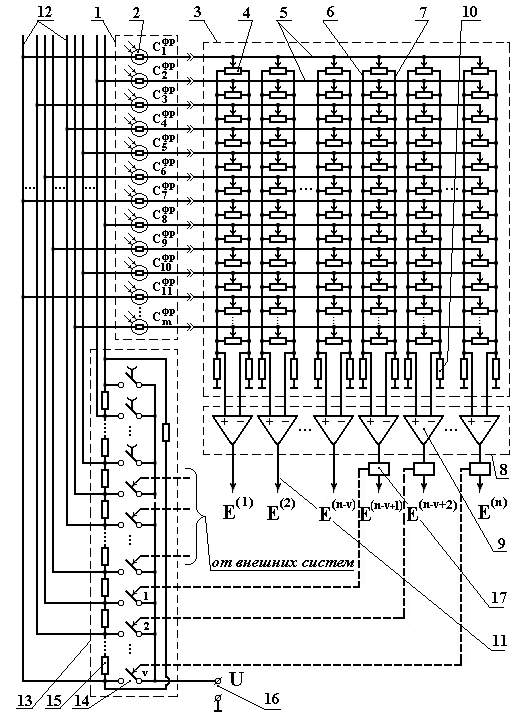
На схеме указаны следующие обозначения:
C1фр, C2фр,..., Cmфр – электрические проводимости рецепторов 2 (индекс внизу обозначает порядковый номер рецептора); m – общее количество рецепторов очувствления; E(1), E(2), . . . , E(n) – сигналы управления на выходах усилителей 9; n – общее количество усилителей 9 устройства;. V – количество элементов 14, управляющие входы которых подсоединены к соответствующим выходам пороговых элементов 17, установленных на выходах 11 части усилителей 9; U – напряжение источника 16. Объединение рецепторов очувствления в группы с отдельными питающими шинами 12 может соответствовать техническим органам чувств: одна группа рецепторов может принадлежать одному техническому глазу, другая – другому глазу, третья – техническому уху, четвертая – технической коже и т.д. Объединение рецепторов в группы может быть осуществлено и внутри отдельного технического органа чувств, например технического глаза. Рецепторы разных групп при этом могут быть распределены равномерно по сетчатке глаза или концентрироваться в определенных областях сетчатки. Отдельная питающая шина 12 может иметь ряд постоянно разомкнутых и постоянно замкнутых параллельных и последовательных элементов 14 с источником 16 и на каждый контакт отдельную пару столбцов 6 и 7, усилитель 9 и пороговый элемент 17, выходы которого соединены с управляющими входами элемента 14. Замыкание питающей шины с источником питания напрямую выделяет ее группу рецепторов среди остальных, т.е. их доля в формировании сигналов управления Е исполнительными органами резко возрастает, что можно назвать концентрацией внимания объекта управления на информации, получаемой от этой группы рецепторов. Величина этой доли определяется, в частности, сопротивлениями резисторов 16, соединяющих питающие шины между собой. Так, если отдельная питающая шина вообще не имеет соединений с остальными (сопротивление резисторов 15 равно бесконечности), а источник питания замкнут только с ней, то величины сигналов управления исполнительными двигателями определяются только группой рецепторов этой питающей шины. И чем ниже сопротивление резисторов 15, тем доля рецепторов отдельной группы в формировании сигнала управления Е меньше. Величины сопротивлений резисторов 15, соединяющих питающие шины 12, могут определяться из условий задач, решаемых объектом управления. Так если объект, например робот с техническим глазом, должен решать две задачи: поиск предметов, отличающихся от фона, и затем уклонение от этих же предметов, – то очевидно, что рецепторы сетчатки глаза должны быть разделены на две группы, равномерно распределенные по площади сетчатки, например в шахматном порядке. При этом одна группа должна формировать сигнал управления, заставляющий робот перемещаться в сторону предмета (сигнал Е в этом случае – положительный), а другая группа должна формировать сигнал управления, перемещающий робот от предмета (сигнал Е – отрицательный). Сопротивление между питающими шинами обеих групп в этом случае должно быть большим или равным бесконечности, когда шины вообще не соединены. Если объект, например транспортный робот, имеет два технических глаза, решающих задачи уклонения от препятствий, но с разных сторон робота, то оба глаза должны одинаково реагировать на препятствия, и, следовательно, сопротивление между питающими шинами обеих групп рецепторов, соответствующих разным глазам робота, должно быть небольшим или равняться нулю. В общем случае сопротивления резисторов, соединяющих питающие шины, определяются тем, какие доли в формировании сигналов управления вносят отдельные группы рецепторов при решении объектом управления поставленных перед ним задач.
Переключение объекта управления на решение различных задач осуществляется при помощи трех групп элементов 14. Одну из этих групп образуют элементы коммутации, управляющие входы которых соединены с выходами пороговых элементов 17, установленных на выходах части усилителей 9, входы которых, в свою очередь, соединены с парными столбцовыми шинами 6 и 7 матрицы 3 технического мозга, соединенной строчными шинами с рецепторами очувствления. Таким образом, замыканием и размыканием контактов элементов 14 этой группы осуществляется ситуация, воспринимаемая рецепторами технических органов чувств устройства. Другую группу образуют элементы 14, управляющие входы которых предназначены для подключения к внешним системам. Ими могут быть обучаемые устройства управления других объектов, системы числового программного управления различного оборудования, ЭВМ систем автоматизированного управления и т.д. Если, например, робот с обучаемым устройством управления предназначен для обслуживания металлорежущего станка, то система ЧПУ станка может переключать робот с решения задачи поиска заготовки и установки ее в приспособление на решение задачи поиска уже изготовленной детали и ее складирования при помощи элементов этой группы. Другую группу образуют элементы 14, выполненные в виде выключателей, замыкание и размыкание которых осуществляется вручную человеком. Эти контакты могут быть использованы, например, для переключения объекта на решение необходимых задач при переходе к обработке другой серии деталей.
Число различных задач, решению которых можно обучать робот, оснащенный данной системой, определяется числом возможных комбинаций распределений питания рецепторов (кроме случая, когда питание не подается ни на одну группу). Если принять число групп рецепторов за
N
k = 2G – 1 .Устройство работает следующим образом. Допустим, обучаемое устройство управления установлено на промышленном роботе, предназначенном для сборки узлов. В качестве органа чувств используют технический глаз, установленный на схвате робота. Цель – обучение робота выполнению двух задач: поиску детали, устанавливаемой в собираемый узел, а затем – поиску собираемого узла для установки в него этой детали. Для решения поставленных задач рецепторы сетчатки глаза разделяют на две группы, равномерно распределенные по сетчатке. Питающие шины обеих групп, соединенные через резистор, имеют спаренные контакты 6 с источником питания; при замыкании электрического контакта одной питающей шины контакт другой питающей шины размыкается и наоборот. Замыкание контактов осуществляется пороговыми элементами. При замыкании первого контакта робот ищет деталь. Когда деталь найдена, срабатывают схват робота и второй пороговый элемент, замыкающий контакт второй шины с источником питания, а затем робот решает вторую задачу – поиск собираемого узла. Сначала необходимо определить стратегию поведения робота. Тот его двигатель, который перемещает схват и установленный на нем глаз вдоль стола с размещенными на нем различными предметами, должен работать в заданном направлении в тех случаях, когда в
поле зрения глаза либо нет предметов, либо есть, но посторонние, и должен останавливаться в том случае, когда в поле зрения находится сориентированный искомый предмет (деталь или узел). Другой двигатель, смещающий схват в направлении, поперечном направлению движения первого двигателя, должен работать в ту или другую сторону при попадании в поле зрения какого-либо предмета так, чтобы этот предмет оказался на центральной оси поля зрения технического глаза, расположенной вдоль направления движения первого двигателя. Третий двигатель должен вращать схват в ту или иную сторону в зависимости от перекоса предмета в поле зрения и, когда искомый предмет находится в заданном положении, двигатель должен остановиться. Какой предмет является искомым в данный момент, определяется замыканием контактов элементов коммутации 14 питающих шин 12. Обучение проводят отдельно для каждого двигателя и одновременно для всех задач.Вторая ситуация: глаз видит посторонний предмет. Им в данном случае является собираемый узел. Необходимо повторить замеры и представить их в виде:
b21, b22, . . . , b2m. Сигнал управления E2(1) в этой ситуации принимаем таким же, как и в первой ситуации. На следующем этапе обучения производят настройку потенциометров 4 по методике, аналогичной той, которая используется для настройки системы, показанной на рис.3.1. После завершения настройки потенциометров 4 первой пары столбцовых шин 6 и 7, т.е. после обучения первого двигателя, переходят к обучению второго двигателя, руководствуясь при этом принятой стратегией поведения робота и той же методикой, которая применялась при обучении первого двигателя.
Пороговые элементы 17 обучают по подобной методике, но стратегия их работы иная. Они могут использоваться для переключения контактов элементов 14 питающих шин, а также для управления работой схвата. Условием срабатывания порогового элемента может быть целевая ситуация, когда в поле зрения располагается найденный искомый предмет и его требуется захватить с помощью схвата и перейти к решению следующей задачи.
Работает обучаемое устройство управления следующим образом. По завершении обучения устройство подключается к объекту управления и на него подается напряжение

где:
g1 – число рецепторов первой группы, g2 – число рецепторов второй группы, g3 – число рецепторов третьей группы и т.д., gG – число рецепторов G-ой группы.Если замкнуть контакт элементов 14 первой питающей шины, то на выходе 11 первого усилителя 9 сформируется сигнал управления
Ef(1), соответствующий тому, что попадает в поле зрения технического глаза, т.е. этот сигнал будет равен нулю в тех случаях, когда в поле зрения технического глаза оказывается первый искомый предмет (деталь) с заданной ориентацией, и будет положительным, когда в поле зрения глаза фон или собираемый узел. Следовательно, первый двигатель робота будет смещать схват с глазом вдоль стола в одном направлении до тех пор, пока в поле зрения не попадет правильно ориентированная деталь, и только в этом случае двигатель остановится. Действия первого двигателя будут успешными, что подтверждает контрольная проверка сигналов управления первого усилителя 9 после завершения обучения. Такими же успешными оказываются действия второго и третьего двигателей, если обучение проведено правильно. Как видно из стратегии обучения, второй и третий двигатели робота смещают и поворачивают глаз так, чтобы искомый предмет оказался в поле зрения правильно ориентированным вне зависимости от его положения на столе. Таким образом, все двигатели робота, действуя согласованно, обеспечивают поиск заданного предмета. Если же замкнуть контакт элемента коммутации 14 второй питающей шины, разомкнув при этом первый, то очевидно будет осуществлен поиск второго заданного предмета (собираемого узла). В целевых ситуациях сигнал управления равен нулю, т.е. поиск предметов гарантирован. Что касается скорости движения при поиске, то она при большей освещенности больше, а при меньшей – меньше, т.е. при ярком освещении движения робота при поиске предметов будут ускоренными, а при слабом освещении – замедленными.
3.4. Обучаемая система управления
с парными рецепторамиКак известно [4
2], в глазах животных имеются рецепторы двух типов: первые реагируют на увеличение освещенности, а другие – на уменьшение. Цель данной разработки [80] – расширение информационных возможностей технических органов чувств путем введения рецепторов с противоположным возбуждением.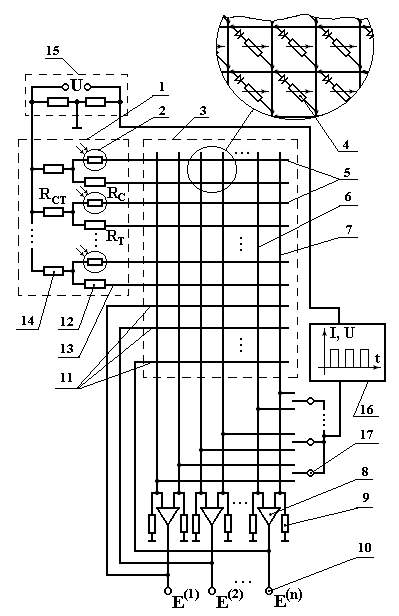
На схеме указаны обозначения:
U – напряжение источника питания 15; Rст – сопротивление резистора 14, стабилизирующего ток соответствующей пары: рецептора очувствления 2 и резистора 12; Rс – сопротивление рецептора очувствления 2; Rт – сопротивление резистора 12; E(1), E(2), ... , E(n) – сигналы управления исполнительными органами объекта управления (на схеме исполнительные органы не показаны) (индекс вверху обозначает порядковый номер исполнительного органа); n – общее количество исполнительных органов; I(t), U(t) – генерация импульсов тока (напряжения).Результирующий сигнал управления
Ef(k) каждой в отдельности пары столбцовых шин 6 и 7 в конкретной ситуации j образуется как сумма элементарных долей eij , подаваемых рецепторами 2 и 12 и дополнительно выходами 10 через группу строчных шин 11:
где:
eij(с) – доля сигнала управления от светового активного резистора (фоторезистора); eij(т) – доля сигнала управления от темнового пассивного резистора. Если внешнее воздействие на какую-то группу активных рецепторов 2 окажется малым, то их вклад (их долевое участие) в результирующий сигнал управления Ef(k) окажется также малым и почти независящим от соответствующих проводимостей ci. В этом случае активные рецепторы 2 оказываются как бы отстраненными от управления объектом. И только введение пассивных рецепторов 12 устраняет этот недостаток. Все пассивные рецепторы 12, парные со слабо возбужденными активными рецепторами 2, подадут на соответствующие строчные шины 13 повышенные напряжения и тем самым примут активное участие в формировании результирующего сигнала управления. На примере обучаемой системы управления с техническим глазом это означает, что объект управления будет соответствующим образом реагировать не только на светлые пятна обозреваемых сцен, но и на темные. Это позволит решать задачи поиска-уклонения как с предметами более светлыми чем фон, так и более темными, а также работать с предметами, имеющими участки темнее и светлее фона.
Парными пассивными рецепторами 12 могут быть дополнены активные рецепторы осязания и давления технической кожи, которой могут быть покрыты, например, ладони схвата робота. Информационные возможности технической кожи при этом расширятся, и обучаемая система управления сможет принимать более сложные решения при захвате или ощупывании предметов.
Установка резисторов 14, стабилизирующих ток в парных рецепторах 2 и 12, кроме своего основного назначения нейтрализует пробои рецепторов. Без таких резисторов в случае пробоя любого рецептора доля его в общем сигнале управления сильно возрастала бы, и это выводило бы из строя всю систему. При наличии резисторов 14 этот дефект почти полностью устраняется.
3.5. Распределитель выходных сигналов
обучаемой системы управленияЦель данной разработки [81] – расширение функциональных возможностей технической нервной системы, ускорение процесса обучения устройства решению поставленных задач, реализация самообучения устройства.
Поставленная цель достигается тем, что в устройство дополнительно введены распределитель выходных сигналов технического мозга, регулятор мощности питания рецепторов, активное устройство обучения, содержащее соединенные последовательно генератор сигналов обучения, регулятор мощности сигналов обучения и распределитель сигналов обучения, с выходами которого соединены преобразователи проводимостей элементов матрицы технического мозга. В устройство введены также рецепторы выходных сигналов технического мозга, рецепторы внешних систем, рецепторы обучения, рецепторы распределения питания, введены первая группа дополнительных питающих шин рецепторов выходных сигналов технического мозга, вторая группа дополнительных питающих шин рецепторов внешних систем, третья группа дополнительных питающих шин рецепторов обучения. Кроме этого в матрицу резисторных элементов технического мозга включены первая группа дополнительных пар столбцовых шин матрицы технического мозга с усилителями для управления распределителем выходных сигналов технического мозга, вторая группа дополнительных пар столбцовых шин с усилителями для управления регулятором мощности питания рецепторов, третья группа дополнительных пар столбцовых шин с усилителями для управления регулятором мощности сигналов обучения и четвертая группа дополнительных пар столбцовых шин с усилителями для управления распределителем сигналов обучения.
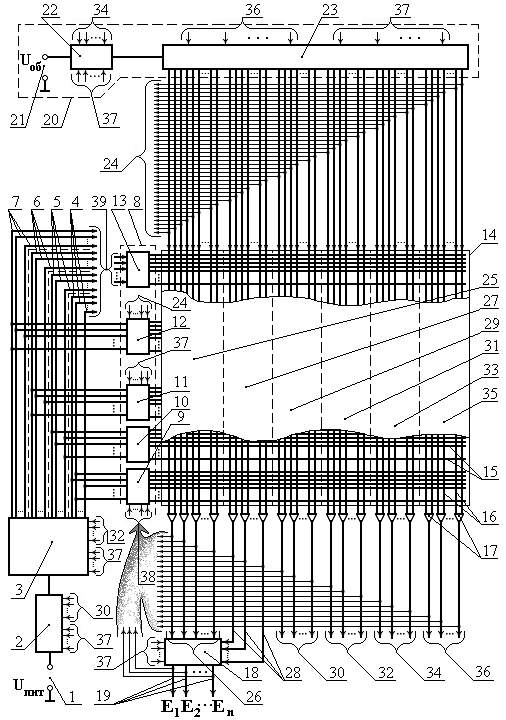
На рис.3.5 представлена схема такой обучаемой системы управления. Она содержит источник постоянного тока 1, регулятор мощности питания рецепторов 2, распределитель питания рецепторов 3, питающие шины рецепторов выходных сигналов технического мозга 4, питающие шины рецепторов очувствления 5, питающие шины рецепторов внешних систем 6, питающие шины рецепторов обучения 7, набор рецепторов технической нервной системы 8, состоящий из рецепторов выходных сигналов технического мозга 9, рецепторов очувствления 10, рецепторов внешних управляющих систем 11 и рецепторов обучения 12, рецепторов распределения питания рецепторов 13, технический мозг 14 в виде матрицы регулируемых резисторных элементов (на схеме не
показаны), соединяющих через диодные элементы (на схеме не показаны) строчные шины 15 матрицы со столбцовыми шинами 16, усилители выходных сигналов технического мозга 17, распределитель выходных сигналов технического мозга 18, выходы которого 19 являются выходами системы на исполнительные органы объекта управления. Кроме этого техническая нервная система содержит активное устройство обучения 20, включающее источник питания устройства обучения 21, регулятор мощности сигналов обучения 22, распределитель сигналов обучения 23, выходы которого 24 соответствуют столбцовым шинам матрицы мозга, и преобразователи проводимостей резисторных элементов матрицы мозга (на схеме не показаны). Столбцовые шины 16 матрицы мозга объединены попарно и разделены на группы вместе с соответствующими им усилителями 17: группа пар столбцовых шин 25 с выходами усилителей 26, предназначенная для управления исполнительными органами объекта управления, группа пар столбцовых шин 27 с выходами усилителей 28, предназначенная для управления распределителем 18 выходных сигналов технического мозга, группа пар столбцовых шин 29 с выходами усилителей 30, предназначенная для управления регулятором мощности 2 питания рецепторов, группа пар столбцовых шин 31 с выходами усилителей 32, предназначенная для управления распределителем питания 3 рецепторов, группа пар столбцовых шин 33 с выходами усилителей 34, предназначенная для управления регулятором 22 мощности сигналов обучения, группа пар столбцовых шин 35 с выходами усилителей 36, предназначенная для управления распределителем 23 сигналов обучения. Часть управляющих входов регулятора мощности 2 питания рецепторов, распределителя питания рецепторов 3, распределителя выходных сигналов технического мозга 18, регулятора мощности сигналов обучения 22, распределителя сигналов обучения 23 предназначена для подключения к выходам внешних управляющих систем 37. Рецепторы мозга имеют управляющие входы 38, предназначенные для получения выходных сигналов усилителей мозга и распределителя выходных сигналов мозга. Рецепторы распределения питания имеют управляющие входы 39, предназначенные для получения выходных сигналов распределителя питания рецепторов.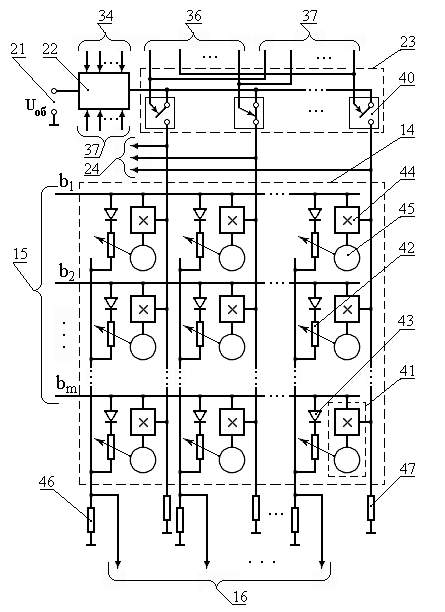
На рис.3.6 показаны технический мозг 14 и активное устройство обучения 20 технической нервной системы, включающее источник питания устройства обучения 21, регулятор мощности сигналов обучения 22, распределитель сигналов обучения 23, выходы которого 24 соответствуют столбцовым шинам матрицы мозга 14. Распределитель 23 содержит электронно управляемые элементы коммутации 40, управляющие входы которых соединены с выходами 36 усилителей отдельной группы пар 35 столбцовых шин технического мозга и управляющими выходами внешних управляющих систем 37. Кроме этого активное устройство обучения включает преобразователи проводимостей 41 резисторных элементов 42 матрицы мозга, соединенных с диодными элементами 43. Каждый из преобразователей проводимостей 41 резисторных элементов мозга 42 содержит перемножитель сигналов 44, входы которого соединены со строчной шиной 15 и выходом 24 распределителя сигналов обучения 23, соответствующего столбцовой шине 15 технического мозга, с которой соединен резисторный элемент 42, проводимость которого регулируется данным преобразователем. Выход перемножителя 44 соединен с регулятором проводимости 45, например электромеханическим в виде электродвигателя, перемещающего подвижный контакт переменного резистора, электрохимическим в виде гальванического элемента или халькогенидного полупроводника, совмещающего в себе преобразователь проводимости и сам регулируемый резисторный элемент мозга. Столбцовые шины матрицы мозга соединены через нагрузочные резисторы 46 с клеммой источника питания 1, а выходы распределителя сигналов обучения соединены через нагрузочные резисторы 47 с клеммой источника питания устройства обучения 21. Диодные элементы 43 установлены таким образом, чтобы пропускать ток через матрицу мозга от одной клеммы источника питания 1 к другой.
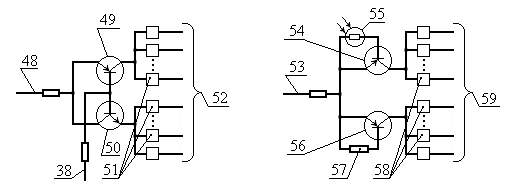
На рис.3.7 показан пример выполнения рецепторов выходных сигналов технического мозга, преобразующих выходные сигналы усилителей, соединенных со столбцовыми шинами технического мозга, и выходные сигналы распределителя выходных сигналов технического мозга в выходные сигналы рецепторов, подаваемых на строчные шины 15 мозга. Рецептор имеет вход 48, пару транзисторных элементов р-n-р 49 и n-р-n 50, управляющий вход 38, соединенный с выходом усилителя технического мозга, а также блоки задержки 51, выходы которых 52 являются выходами рецептора. В зависимости от знака сигнала на выходе усилителя открывается один из транзисторных элементов и на строчные шины 15 (рис.3.5) технического мозга, с которыми соединен открытый транзисторный элемент, подается ток одной из питающих шин 4 (рис.3.5), величина которого определяется величиной сигнала, поданного на базу транзисторного элемента. Пример выполнения рецепторов выходных сигналов технического мозга совпадает с примером выполнения рецепторов внешних систем, которые преобразуют управляющие сигналы внешних управляющих систем в выходные сигналы рецепторов, подаваемые на строчные шины технического мозга.
На рис.3.8 показан пример выполнения рецептора очувствления, имеющего вход 53, транзисторный элемент 54 и соответствующий ему чувствительный элемент 55, например фоторезистор, транзисторный элемент 56 и соответствующий ему резисторный элемент 57, блоки задержки 58, выходы которых 59 являются выходами рецептора на строчные шины 15 (рис.3.5) технического мозга. Управляющим входом рецептора очувствления является изменение освещенности фоторезистора.
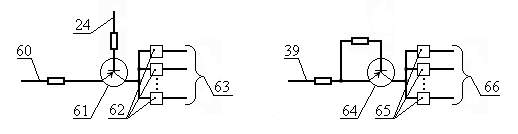
На рис.3.9 показан пример выполнения рецептора обучения, имеющего вход 60, транзисторный элемент 61, управляющий вход 24 и блоки задержки 62, выходы которых являются выходами 63 рецептора на строчные шины 15 (рис.3.5) технического мозга.
На рис.3.10 показан пример выполнения рецептора распределения питания рецепторов, имеющего вход 39, транзисторный элемент 64, блоки задержки 65, выходы которых являются выходами 66 рецептора на строчные шины 15 (рис.3.5) технического мозга. Управляющий вход рецептора распределения питания совпадает с его информационным входом.
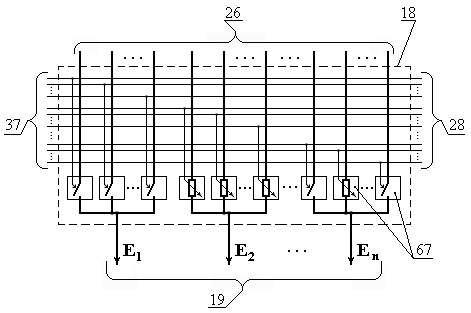
На рис.3.11 показан пример выполнения распределителя выходных сигналов технического мозга, содержащий электронно управляемые элементы коммутации 67, имеющие коммутируемые входы 26 и выходы 19, и управляющие входы, соединенные с выходами 28 усилителей отдельной группы пар 27 столбцовых шин технического мозга и управляющими выходами внешних управляющих систем 37.
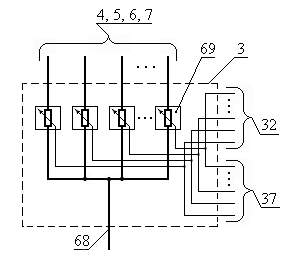
На рис.3.12 показан пример выполнения распределителя питания рецепторов. Распределитель имеет вход 68 и содержит электронно управляемые элементы коммутации 69, управляющие входы которых соединенные с выходами 32 усилителей отдельной группы пар 31 (рис.3.5) столбцовых шин технического мозга и управляющими выходами внешних управляющих систем 37. Выходы элементов коммутации 69 являются выходами распределителя и соединены с питающими шинами 4, 5, 6, 7 (рис.3.5) рецепторов.
На рис.3.13 показан пример выполнения распределителя сигналов обучения 23 активного устройства обучения в соединении с регулятором мощности 22 и генератором сигналов обучения, выполненным в виде двуполярного источника питания постоянного тока 21.
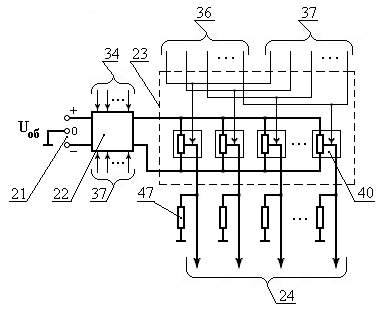
Распределитель содержит электронно управляемые элементы коммутации 40, входы которых соединены с выходами 36 усилителей отдельной группы пар 35 (рис.3.5) столбцовых шин технического мозга и управляющими выходами внешних управляющих систем 37. Выходы 24 элементов коммутации 40 соединены через резисторы 47 с нулевой клеммой двуполярного источника питания постоянного тока 21 и являются выходами распределителя сигналов обучения.
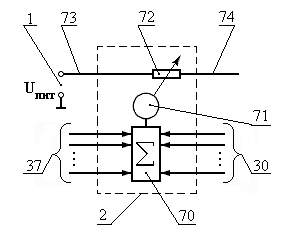
На схемах указаны обозначения:
Uпит – напряжение источника питания рецепторов; Uоб – напряжение источника питания активного устройства обучения; b1, b2, . . . , bm – выходные сигналы рецепторов; E1, E2, . . . , En – выходные сигналы распределителя выходных сигналов технического мозга. Одна клемма источника питания 1 постоянного тока соединена со входом 73 регулятора мощности питания 2 рецепторов, выход 74 которого соединен с входом 68 распределителя питания 3 групп рецепторов, представляющего собой набор элементов коммутации 69, соединяющих выход регулятора мощности питания рецепторов с питающими шинами рецепторов выходных сигналов технического мозга 4, питающими шинами рецепторов очувствления 5, питающими шинами рецепторов внешних систем 6, питающими шинами рецепторов обучения 7. Набор рецепторов 8, включает в себя рецепторы выходных сигналов технического мозга 9, рецепторы очувствления 10, которые образуют технические органы чувств, рецепторы управляющих сигналов внешних управляющих систем 11, рецепторы обучения 12 и рецепторы распределения питания 13. Вход 48 каждого рецептора выходных сигналов технического мозга соединен с одной из питающих шин соответствующей группы 4, а каждый из его выходов 52 – с отдельной строчной шиной 15 матрицы технического мозга 14. Вход 53 каждого рецептора очувствления соединен с одной из питающих шин соответствующей группы 5, а каждый из его выходов 59 – с отдельной строчной шиной 15 матрицы технического мозга 14. Вход 48 каждого рецептора внешних систем соединен с одной из питающих шин соответствующей группы 6, а каждый из его выходов 52 – с отдельной строчной шиной 15 матрицы технического мозга 14. Вход 60 каждого рецептора обучения соединен с одной из питающих шин соответствующей группы 7, а каждый из его выходов 63 – с отдельной строчной шиной 15 матрицы технического мозга 14, вход 39 каждого рецептора распределения питания соединен с одной из питающих шин, а каждый из его выходов 66 – с отдельной строчной шиной 15 матрицы технического мозга 14. Состояние элементов коммутации 69 распределителя питания 3 рецепторов определяет какие рецепторы получают более мощное питание, а какие – менее, т.е. определяет концентрацию внимания объекта управления с технической нервной системой на информации, получаемой от рецепторов, имеющих более мощное питание в данный момент.
Управляющий вход 38 каждого из рецепторов выходных сигналов технического мозга соединен с управляющим (открывающим) входом транзисторного элемента 49 и с управляющим (запирающим) входом транзисторного элемента 50, входы которых соединены с одной из питающих шин группы 4, а выход каждого из них разделен на множество выходов с блоками задержки 51, имеющими различные постоянные времени задержки (растягивания) сигнала, и каждый из выходов 52 которых соединен с отдельной строчной шиной 15 матрицы технического мозга.
Аналогичное соединение имеют элементы рецепторов выходных сигналов внешних управляющих систем, вход каждого из которых соединен с одной из питающих шин группы 6, а управляющие входы 39 соединены с выходами внешних управляющих систем.
Рецепторы очувствления образуют технические органы чувств объекта с технической нервной системой. В качестве технических органов чувств могут быть использованы технические глаза, уши, кожа и другие органы в любом соотношении и количестве. Для технического глаза, например, рецептор очувствления содержит чувствительные элементы 55, реагирующие на изменение освещенности изменением электрической проводимости, скажем фоторезисторы, для технической кожи – переменные резисторы из токопроводящей резины, изменяющие свою проводимость в зависимости от усилия нажатия, для технических ушей – микрофоны с узкой полосой пропускания звуковых частот и т.д. Выход чувствительного элемента соединен с управляющим (открывающим) входом транзисторного элемента 54, вход которого соединен с питающей шиной соответствующей группы 5, а выход разделен на множество выходов с блоками задержки 58, имеющими различные постоянные времени задержки сигнала, и выходы 59 которых соединены со строчными шинами 15 матрицы технического мозга. Резистор 57, соединяющий питающую шину с управляющим входом транзисторного элемента 56, позволяет подавать ток питающей шины на строчные шины мозга при отсутствии внешних воздействий на чувствительный элемент 55. Это означает для фоторезистора, например, отсутствие освещенности. При этом его проводимость стремится к нулю, и ток питающей шины идет через резистор 57.
Управляющий вход 24 каждого из рецепторов обучения соединен с управляющим (открывающим) входом транзисторного элемента 61, вход которого соединен с одной из питающих шин группы 7, а выход которого разделен на множество выходов с блоками задержки 62, имеющими различные постоянные времени задержки сигнала, и каждый из выходов 63 которых соединен с отдельной строчной шиной 15 матрицы технического мозга. Управляющий вход 39 каждого из рецепторов распределения питания соединен с управляющим (открывающим) входом транзисторного элемента 64, вход которого соединен с одной из питающих шин групп 4, 5, 6, 7, а выход которого разделен на множество выходов с блоками задержки 65, имеющими различные постоянные времени задержки сигнала, и каждый из выходов 66 которых соединен с отдельной строчной шиной 15 матрицы технического мозга.
Рецепторы очувствления и рецепторы внешних управляющих систем являются экстероцепторами технической нервной системы: они воспринимают сигналы, поступающие извне; рецепторы выходных сигналов технического мозга, рецепторы обучения и рецепторы распределения питания – это интероцепторы технической нервной системы: они воспринимают сигналы, сформированные внутри самой технической нервной системы.
Технический мозг 14 имеет вид матрицы и является активным преобразователем информации рецепторов, поступающей в виде электрических сигналов с выходов рецепторов через блоки задержки на строчные шины 15 матрицы, в выходные сигналы технического мозга, снимаемые со столбцовых шин 16 матрицы. Каждая строчная шина 15 соединена со всеми столбцовыми шинами 16 матрицы. Каждое соединение с отдельной столбцовой шиной представляет собой последовательно соединенные регулируемый резисторный элемент 42 и диодный элемент 43. Столбцовые шины матрицы технического мозга объединены попарно и соединены со входами двуполярных усилителей 17 выходных сигналов технического мозга, а через нагрузочные резисторы 46 – с другой клеммой источника питания рецепторов 1. Одну из пары столбцовых шин можно условно назвать плюс-столбцом, а другую – минус-столбцом. Число пар столбцовых шин технического мозга может быть намного больше числа исполнительных двигателей объекта управления и определяется количеством и сложностью решаемых им задач и требуемой надежностью технической нервной системы, т.е. для параллельного и (или) поочередного управления одним исполнительным двигателем может быть выделено несколько пар столбцовых шин матрицы мозга.
Выходы 28 двуполярных усилителей 17 выходных сигналов технического мозга соединены с управляющими входами элементов коммутации 67 распределителя выходных сигналов усилителей технического мозга 18, а выходы элементов коммутации 67 соединены с выходами распределителя 19. Выходы 19 распределителя выходных сигналов усилителей технического мозга являются выходами технической нервной системы на исполнительные органы объекта управления. Состояние элементов коммутации 67 распределителя выходных сигналов 18 определяет какие пары столбцовых шин матрицы технического мозга участвуют в управлении объектом с технической нервной системой при решении текущей задачи. При переходе к решению другой задачи соответствующим образом изменяется состояние элементов коммутации 67 (включен-выключен), соединяя при этом с выходами распределителя 18 другие пары столбцовых шин, элементы матрицы которых участвовали в обучении решению этой задачи.
Техническая нервная система содержит активное устройство обучения 20. Оно включает генератор сигналов обучения 21, представляющий собой источник питания устройства обучения постоянного тока, одна клемма которого соединена со входом регулятора мощности сигналов обучения 22. Выход регулятора 22 соединен со входами элементов коммутации 40 распределителя сигналов обучения 23. Выходы 24 элементов коммутации являются выходами распределителя сигналов обучения 23, которые соответствуют столбцовым шинам матрицы технического мозга и соединены с преобразователями 41 сигналов обучения в изменение проводимости регулируемых резисторных элементов 42 матрицы мозга. Каждый преобразователь 41 соответствует отдельному резисторному элементу 42 матрицы и содержит перемножитель сигналов 44: сигнала от строчной шины, соединенной с данным резисторным элементом, и сигнала обучения от выхода распределителя сигналов обучения 23, соответствующего той столбцовой шине матрицы, с которой соединен данный регулируемый элемент 42. Выход перемножителя 44 соединен с управляющим входом регулятора проводимости 45 резисторного элемента 42 матрицы мозга, изменяющего его проводимость пропорционально управляющему сигналу. В качестве таких регуляторов проводимости могут быть использованы электромеханические, электрохимические, электронные и другие преобразователи. Выходы 24 распределителя сигналов обучения 23 соединены также через нагрузочные резисторы 47 с другой клеммой источника питания 21 устройства обучения 20. Состояние элементов коммутации 40 распределителя сигналов обучения 23 (включен-выключен) определяет, какие столбцовые шины и соответствующие им регулируемые резисторные элементы 42 матрицы технического мозга участвуют в обучении объекта с технической нервной системой решению текущей задачи. При переходе к обучению решению другой задачи соответствующим образом изменяется состояние элементов коммутации 40, включая в обучение другие пары столбцовых шин и соответствующие им резисторные элементы 42 матрицы мозга.
Выходы всех усилителей 17 выходных сигналов технического мозга и выходы распределителя выходных сигналов 18 технического мозга соединены с управляющими входами рецепторов 9 выходных сигналов технического мозга. Одновременно выходы усилителей группы пар столбцовых шин 29 соединены с управляющими входами 30 регулятора мощности 2 питания рецепторов. Выходы усилителей группы пар столбцовых шин 31 соединены с управляющими входами 32 распределителя питания 3 рецепторов. Выходы усилителей группы пар столбцовых шин 33 соединены с управляющими входами 34 регулятора мощности 22 сигналов обучения. Выходы усилителей группы пар столбцовых шин 35 соединены с управляющими входами 36 распределителя сигналов обучения. Выходы усилителей группы пар столбцовых шин 27 соединены с управляющими входами распределителя выходных сигналов усилителей технического мозга. Кроме этого, управляющие входы регулятора мощности питания рецепторов, распределителя питания рецепторов, регулятора мощности сигналов обучения, распределителя сигналов обучения, распределителя выходных сигналов усилителей технического мозга подключены к выходам 37 внешних управляющих систем, которые, в свою очередь, соединены с управляющими входами рецепторов внешних систем. Распределитель выходных сигналов технического мозга, распределитель питания рецепторов и распределитель сигналов обучения могут включать в себя как электронно управляемые элементы коммутации, так и элементы коммутации, переключаемые механически, например вручную человеком, которого в этом случае можно рассматривать как внешнюю управляющую систему. Элементы коммутации распределителя выходных сигналов технического мозга, распределителя питания рецепторов и распределителя сигналов обучения могут быть выполнены в виде регуляторов плавно изменяющих проводимость резисторного элемента, соединяющего вход и выход элемента коммутации, от нуля до бесконечности в зависимости от величины сигнала управления, полученного с выхода усилителя технического мозга или от внешней управляющей системы.
Генератор сигналов обучения может быть выполнен в виде двуполярного источника питания постоянного тока 21 (рис.51), что позволяет изменять проводимость резисторных элементов мозга 42 как в сторону увеличения, так и в сторону уменьшения. Это расширяет диапазон изменения проводимостей резисторных элементов мозга при обучении и позволяет избежать возможности выхода проводимостей всех резисторных элементов на максимальный уровень, что делает невозможным дальнейшее обучение. Пример выполнения рецепторов обучения в этом случае совпадает с примером выполнения рецепторов выходных сигналов мозга и рецепторов внешних систем.
Значения выходных сигналов рецепторов можно назвать ощущениями. Если они вызваны внешними факторами – это внешние ощущения. К ним можно отнести ощущения холода, тепла, света, управляющие сигналы внешних систем и т.д., т.е. значения выходных сигналов рецепторов очувствления, а также рецепторов внешних управляющих систем. Ощущения системой самой себя, внутренние ощущения – это значения выходных сигналов технического мозга и распределителя выходных сигналов технического мозга, выведенные через рецепторы выходных сигналов технического мозга на строчные шины матрицы мозга, а также значения выходных сигналов рецепторов распределения питания и рецепторов обучения.
Предлагаемое устройство подсоединяется к объекту управления, например к роботу, т.е. выходы распределителя выходных сигналов усилителей технического мозга соединяются с управляющими входами исполнительных двигателей объекта управления и включается напряжение
![]()
где
m – число выходов рецепторов системы (число строчных шин технического мозга); kу – коэффициент усиления усилителя 17. Сигналы с выходов усилителей подаются на распределитель 18 выходных сигналов технического мозга, выходы которого 19 являются выходами системы, а выходные сигналы являются управляющими для исполнительных двигателей объекта управления. Движения исполнительных органов или реакции объекта управления, определяемые управляющими сигналами, формируют поведение объекта управления. Из приведенной формулы и схемы технической нервной системы следует, что управление объектом такой системой осуществляется практически в реальном времени и определяется только инерционностью рецепторов, т.к. сигналы с выходов рецепторов с задержками стремящимися к нулю мгновенно формируют сигналы управления на выходах технического мозга, а сигналы с выходов рецепторов с ненулевыми задержками позволяют учитывать при формировании сигналов управления ситуации, предшествующие текущей, причем, с разным временем отдаления от нее. Таким образом в управлении объектом учитывается динамика изменения ситуаций. Поскольку возбуждения рецепторов изменяются не мгновенно, и не мгновенно изменяется воспринимаемая рецепторами ситуация, то и выходные сигналы технической нервной системы изменяются плавно, т.е. объект управления с технической нервной системой характеризуется плавной динамикой его движений. Сигналы выходов усилителей 17 отдельной группы 27 столбцовых шин матрицы технического мозга идут на управляющие входы 28 распределителя 19 выходных сигналов технического мозга. Сигналы выходов усилителей 17 отдельной группы 29 столбцовых шин матрицы технического мозга идут на управляющие входы 30 регулятора мощности питания рецепторов 2. Сигналы выходов усилителей 17 отдельной группы 31 столбцовых шин матрицы технического мозга идут на управляющие входы 32 распределителя питания рецепторов 3. Сигналы выходов усилителей 17 отдельной группы 33 столбцовых шин матрицы технического мозга идут на управляющие входы 34 регулятора мощности сигналов обучения 22. Сигналы выходов усилителей 17 отдельной группы 35 столбцовых шин матрицы технического мозга идут на управляющие входы 36 распределителя сигналов обучения 23. Одновременно на управляющие входы 37 распределителя выходных сигналов технического мозга, регулятора мощности питания рецепторов, распределителя питания рецепторов, регулятора мощности сигналов обучения и распределителя сигналов обучения приходят управляющие сигналы внешних управляющих систем. Управляющие сигналы усилителей технического мозга и внешних управляющих систем определяют состояние элементов коммутации распределителей питания и обучения и мощность питания рецепторов и сигналов обучения. Все это влияет на значения выходных сигналов управления технической нервной системы, определяя поведение объекта управления, оснащенного данной системой.
Прежде чем включить техническую нервную систему в работу, ее необходимо подготовить, обучить предварительным установочным навыкам, т.е. настроить регулируемые резисторные элементы технического мозга таким образом, чтобы обеспечить выполнение объектом управления поставленных перед ним задач.
Процесс обучения, заключающийся в формировании проводимостей регулируемых резисторных элементов мозга, аналогичен формированию условных рефлексов в живой природе. Если в какой-либо ситуации сигнал управления отдельным исполнительным органом не удовлетворяет обучателя, он через активное устройство обучения подает обучающий сигнал на соответствующий столбец матрицы технического мозга. Это можно осуществить, например, нажимая кнопку из токопроводящей резины, в виде которой выполнен элемент коммутации распределителя сигналов обучения. Чем сильнее усилие нажатие кнопки, тем больше значение обучающего сигнала, подаваемого на соответствующие преобразователи проводимостей резисторных элементов. При этом может исказиться сигнал управления данным исполнительным органом в другой ситуации. Его аналогично корректируют до требуемой величины. Затем переходят к следующей ситуации, соответствующей очередному шагу обучения. Проведя обучение во всех ситуациях обучаемой выборки, снова возвращаются к первой и т.д. На каждом шаге обучения происходит изменение проводимости на D
ci каждого i-го элемента матрицы мозга, соединенного со столбцом матрицы пропорционально сигналу bi , поданному на строчную шину, и сигналу обучения на выходе распределителя сигналов обучения, который соответствует данной столбцовой шине:
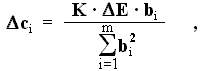
где: D
E – величина отклонения сигнала от требуемого значения; K – коэффициент пропорциональности, если K>1 – переобучение, если K<1 – недообучение, если K=1 , сигнал управления равен требуемому. До начала обучения проводимость резисторных элементов матрицы мозга равна нулю или имеет минимальное значение. Процесс обучения продолжают до тех пор, пока не получат требуемые сигналы управления всеми исполнительными двигателями во всех ситуациях обучаемой выборки. При достижении заданных величин сигналов управления в ситуациях обучаемой выборки обучение заканчивается.
Часть резисторных элементов матрицы технического мозга может быть отключена от устройства обучения, значения их проводимостей устанавливаются неизменными для данного объекта управления. Поведение объекта или реакции, которые определяют такие элементы, соответствуют безусловным рефлексам в живой природе и являются необходим условием для самообучения.
Для реализации обучения и самообучения объекта с технической нервной системой служит активное устройство обучения 20. В процессе обучения ток идет от одной клеммы источника питания 21, через регулятор мощности 22 сигналов обучения подается на вход распределителя 23 сигналов обучения. Величина тока, проходящего через регулятор мощности, зависит от сигналов 34 усилителей отдельной группы 33 пар столбцовых шин матрицы мозга и сигналов 37 внешних управляющих систем. Далее ток идет через элементы коммутации 40 распределителя 23 сигналов обучения на выходы 24 и через резисторы 47 возвращается на вторую клемму источника питания 21.
Ток на выходах 24 распределителя сигналов обучения зависит от проводимостей элементов коммутации 40, которые определяются управляющими сигналами 36 усилителей отдельной группы 35 столбцовых шин матрицы технического мозга (при самообучении) и управляющими сигналами 37 внешних управляющих систем (при наличии внешнего обучателя, например человека). Если управляющих сигналов нет, проводимости элементов коммутации равны нулю, сигналы на выходах 24 распределителя 23 сигналов обучения также равны нулю, и обучения системы не происходит. При появлении сигнала на управляющем входе одного из элементов коммутации, его проводимость увеличивается, и сигнал обучения проходит на один из выходов распределителя и далее – на преобразователи проводимостей 41 резисторных элементов матрицы мозга, соединенным с этим выходом. В каждом преобразователе сигнал обучения идет на один из входов перемножителя 44 сигналов, на другой вход которого по строчной шине матрицы мозга подается сигнал выхода рецептора. Сигнал с выхода перемножителя, равный произведению входных сигналов, идет на управляющий вход регулятора проводимости 45, изменяющего проводимость соответствующего резисторного элемента 42 пропорционально управляющему сигналу. Изменение проводимостей резисторных элементов матрицы мозга приводит к изменению выходных сигналов усилителей 17 мозга и распределителя выходных сигналов технического мозга, что определяет изменение поведения объекта управления в соответствии с целью обучения.
Рассмотрим процесс обучения и работы технической нервной системы на конкретном примере. Допустим, объект управления – робот, оснащенный технической нервной системой в виде технического глаза, совмещенного со схватом, имеет три степени подвижности с соответствующими исполнительными органами, оснащенными исполнительными двигателями, регулируемыми по скорости, т.е. скорость вращения двигателя пропорциональна сигналу управления на соответствующем выходе распределителя выходных сигналов технического мозга. Робот необходимо обучить поиску темных предметов на светлом фоне, используя несколько наиболее типичных ситуаций в обучаемой выборке, в которых определены требуемые сигналы управления каждым исполнительным органом, включая целевые ситуации, в которых сигнал управления отдельным двигателем равен нулю. При этом можно использовать так называемые обобщенные ситуации, т.е. ситуации не конкретных зрительных сцен, а включающих несколько или целый класс ситуаций. Задача
поиска – основная задача технических нервных систем, практически любую сложную задачу можно разложить на ряд элементарных задач поиска. Под решением задачи поиска отдельного исполнительного двигателя понимается стремление объекта управления к такой ситуации, когда сигнал управления этим двигателем равен нулю.Разделение выхода каждого из рецепторов очувствления, рецепторов выходных сигналов технического мозга, рецепторов внешних систем, рецепторов обучения, рецепторов распределения питания на множество выходов с блоками задержки сигналов, время задержки у которых различное и находится в широких пределах, позволяет учитывать при обучении и в работе не только текущую информацию, но и предшествовавшую ей, т.е. позволяет учитывать скорости движений объекта управления и внешних объектов, а также их производные.
Некоторые пары столбцов могут быть обучены управлению исполнительными двигателями только в зависимости от сигналов, полученных от рецепторов выходных сигналов технического мозга. Они могут быть использованы для выполнения некоторых автоматических движений без учета состояния внешней среды, например для возвращения исполнительных органов объекта управления в исходное состояние после выполнения задачи поиска.
Для управления одним исполнительным двигателем может использоваться множество выходов технического мозга одновременно, т.е. реализовываться параллельное управление. Это повышает надежность работы технической нервной системы, т.к. потеря некоторого числа выходов технического мозга в результате, например, обрыва проводов не приведет к выходу ее из строя, а только снизит точность поведения объекта, которую можно снова повысить за счет дообучения оставшихся выходов мозга, соединенных с данным исполнительным органом. Выходной сигнал на исполнительный орган при параллельном управлении определяется формулой
где
Eр – результирующий сигнал управления одним исполнительным двигателем; El – сигнал выхода одного l-го усилителя из выделенных для управления данным исполнительным двигателем; L – число выходов мозга на данный исполнительный двигатель.Наличие возможности прямого подключения внешних систем к управляющим входам распределителя питания рецепторов, регулятора мощности питания рецепторов, распределителя выходных сигналов технического мозга, распределителя сигналов обучения, регулятора мощности сигналов обучения и управляющим входам рецепторов внешних систем позволяет техническим нервным системам объединяться между собой и с другими системами, например компьютерными, в единую электронную систему.
| Site of Information
Technologies Designed by inftech@webservis.ru. |
|