5. Реализация обучаемых систем управления
5.1. Варианты физической реализации
обучаемых систем управленияПринципы построения и работы обучаемых систем управления могут быть реализованы на основе различных физических принципов. Эти системы могут быть оптическими, электрическими, механическими, гидравлическими, пневматическими и т.д. Кстати, можно найти аналогию в работе большинства (если не всех) существующих систем с работой обучаемых систем управления. Например такая механическая система, как замок и ключ может рассматриваться как механическая обучаемая система, в которой положение пластин замка (они играют роль рецепторов), при которой он открывается, определяют целевую ситуацию, а участки профиля ключа аналогичны весовым коэффициентам. Наложение целевой ситуации на эти весовые коэффициенты дает выход, результат – замок открывается. Формирование требуемого профиля ключа в этом примере – своего рода процесс обучения. Программируемые системы управления (ЧПУ) – тоже можно рассматривать как частный случай обучаемых систем с единственным датчиком (рецептором) времени, у которой для каждого такта (отрезка времени) программного цикла – свои весовые коэффициенты для исполнительных двигателей, определяющие движение всего управляемого механизма, робота или станка.
Математическая модель обучаемой системы управления, основной частью которой является расчет весовых коэффициентов признаков образов ситуаций, имеет самостоятельное значение, т.к. позволяет использовать дискретные системы (компьютеры, системы числового программного управления и др.) в режиме обучаемых систем. Это может быть использовано как для практического управления каким-либо объектом, так и для моделирования такого управления на компьютере. Такое моделирование позволяет выбрать ситуации обучаемой выборки, менять их и увидеть результат обучения, что ускоряет обучение реального объекта. И, что особенно важно для разработчиков и исследователей обучаемых систем управления, математическая модель позволяет изучать закономерности процесса обучения и работы таких систем. Так, многие результаты, представленные в данной работе, были получены благодаря использованию математической модели.
Программный вариант обучаемой системы управления может быть реализован как на универсальной вычислительной технике так и с использованием специализированных процессоров, предназначенных для расчета весовых коэффициентов в процессе обучения и для расчета выходных сигналов в ходе управления объектом.
К недостаткам использования цифровых технологий для реализации обучаемых систем
Рассмотрим некоторые разработанные варианты реализации обучаемых систем управления.
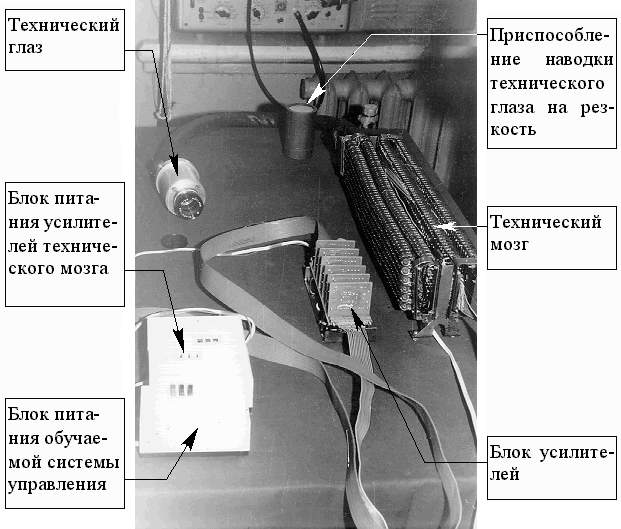
Оптический вариант обучаемой системы управления [76] характеризуется наглядностью того, что ее технический мозг, выполненный в виде фотопозитивов на прозрачной подложке, не содержит определенных образов, эталонов и т.д., а имеет некое абстрактное изображение, сформированное в результате многократного обучения (экспонирования и проявления) во всех ситуациях обучаемой выборки.
На рис.5.1 представлена схема обучаемого оптического устройства управления для отдельного исполнительного органа.
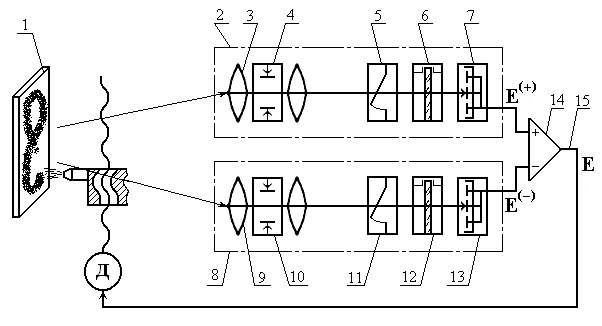
Устройство, реагирующее на некоторую ситуацию (зрительный образ 1), содержит два оптических канала – плюс-канал 2, содержащий последовательно оптически связанные первый объектив 3 с регулируемой диафрагмой 4, первый оптический затвор 5, первый блок 6 памяти и первый многоэлементный фотоприемник 7, и минус-канал 8, содержащий последовательно оптически связанные второй объектив 9 с регулируемой диафрагмой 10, второй оптический затвор 11, второй блок 12 памяти и второй многоэлементный фотоприемник 13. Устройство содержит также элемент
14 сравнения, входы которого подключены соответственно к выходам первого и второго фотоприемников 7, 13, а выход элемента сравнения является выходом 15 устройства.
5.2. Варианты электрической реализации
обучаемых систем управления5.2.1. Обучаемая система управления с резисторной
матрицей из подстроечных резисторов Вариант выполнения обучаемой системы управления, в котором резисторные элементы матрицы технического мозга представляют собой подстроечные резисторы, является наиболее удобным для научно-исследовательских и учебных целей. Этот вариант позволяет непосредственно вмешиваться в работу отдельных элементов технического мозга, и именно на таком варианте проводились научные исследования, отраженные в данной работе.
В свое время (1990 год) этот вариант обучаемой системы управления предлагался ВУЗам и НИИ страны в качестве готового образца с установкой на промышленные роботы. Были разосланы рекламные материалы: краткое описание, технические характеристики и фотографии робота ТУР-10К, оснащенного обучаемой системой управления со зрением. Был осуществлен ряд газетных публикаций, а также проведены съемки передачи для телевидения (рис.5.2), в которой рассказывалось о достижениях и перспективах в развитии обучаемых систем управления.
Эти материалы нашли отклик в ЦНИИМаше и привели к заключению хозяйственного договора об оснащении робота РМ-01 обучаемой системой.
5.2.2. Обучаемая система управления с резисторной матрицей,
элементы которой выполнены в виде графитовых соединенийВ ходе выполнения хозяйственного договора с ЦНИИМаш в 1991 году была разработана и изготовлена компактная обучаемая система управления (рис.5.3, 5.4), в которой роль резисторных элементов матрицы мозга выполняют графитовые дорожки, наносимые, например, карандашом на поверхность текстолитовых пластин и соединяющие строчные шины матрицы со столбцовыми шинами (рис.5.5).
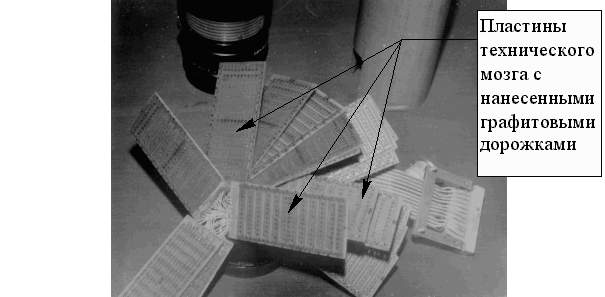
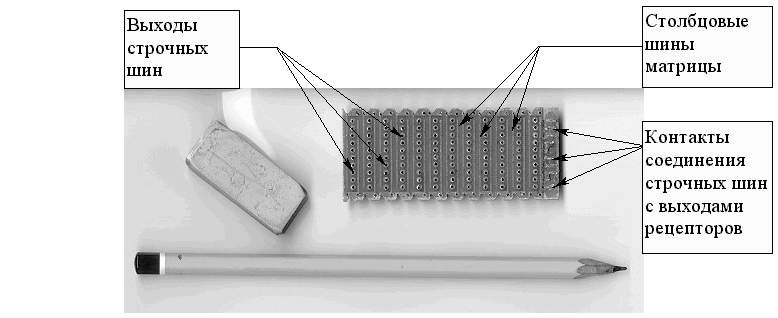
Интенсивность нанесения и ширина дорожки определяли ее проводимость. Эту проводимость легко изменять: увеличивать – карандашом и уменьшать – стиральной резинкой (рис.5.6). Настройка такой обучаемой системы аналогична настройке системы, технический мозг которой выполнен с использованием подстроечных резисторов.
5.2.3. Обучаемая система управления с резисторной матрицей,
элементы которой выполнены из халькогенидных полупроводников Использование халькогенидных полупроводников в обучаемых системах управления представляется очень перспективным как в качестве фоточувствительных рецепторов, так и в качестве резисторных элементов матрицы технического мозга [55 – 57]. Элементы из халькогенидных полупроводников имеют малые размеры и изменяют свою проводимость под воздействием электрических импульсов. Параметры импульсов могут изменяться в широких пределах. Эти импульсы не мешают работе системы, т.к. не сказываются на работе исполнительных двигателей из-за их инерционности, что позволяет реализовывать динамический метод обучения системы, т.е. обучение в процессе работы объекта управления.
Таким образом, использование халькогенидных полупроводников позволяет миниатюризировать обучаемые системы и автоматизировать процесс обучения, реализуя метод “вождения за руку”. На руке робота располагают кнопки из токопроводящей резины, включающие импульсы обучения соответствующего двигателя. Мощность импульсов зависит от усилия нажатия на кнопку. Располагаться кнопки должны таким образом, чтобы нажатие на них соответствовало бы требуемому направлению движения робота.
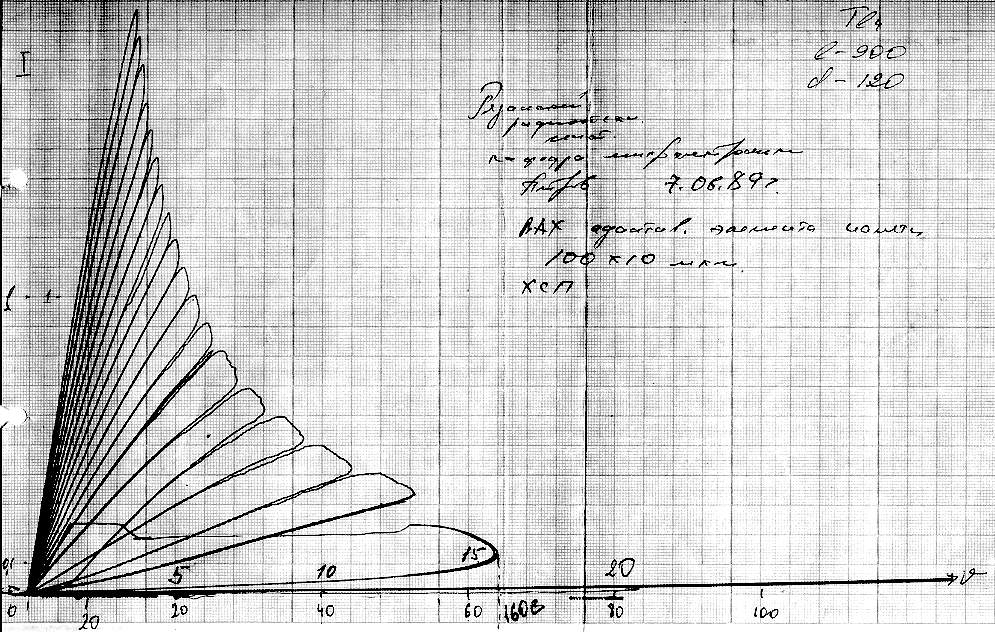
Большую роль в развитии этого направления сыграло сотрудничество нашей научной группы с группой кафедры полупроводников Рязанского радиотехнического института, руководимой Петровым Игорем Михайловичем. Сотрудниками кафедры полупроводников были проведены многочисленные исследования вольт-амперных характеристик элементов с различными параметрами по составу и размеру (рис.5.7).
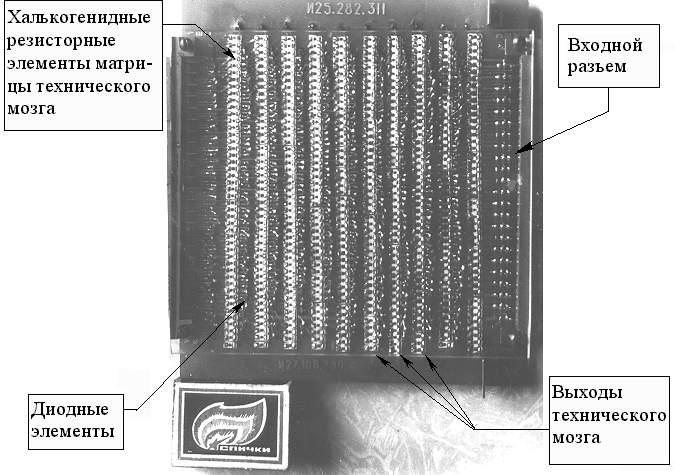
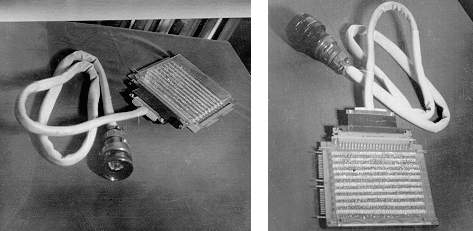
Они же изготовили по нашему заказу две матрицы технического мозга. Одна из них (рис.5.8) изготовлена из отдельных резисторных элементов и с диодной развязкой, исключающей появление блуждающих токов в матрице.
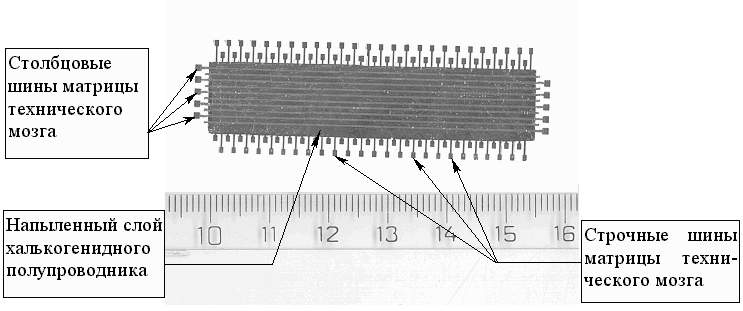
Другая изготовлена напылением слоя полупроводника на строчные шины, на который, в свою очередь, были напылены столбцовые шины (рис.5.9).
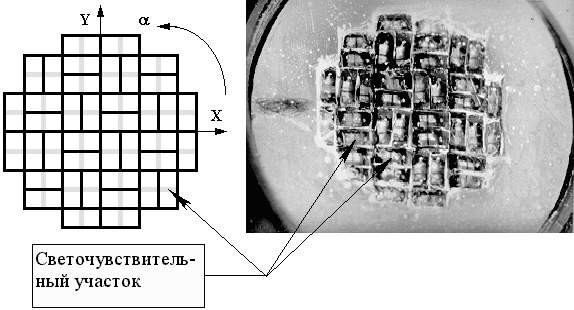
Первая матрица была использована в качестве технического мозга обучаемой системы управления со зрением с сорока рецепторами сетчатки (рис.5.10) технического глаза и с пятью парами выходов на исполнительные двигатели (рис.5.11).
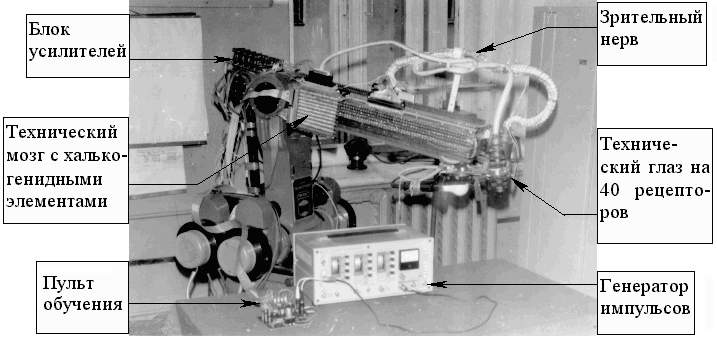
Для корректировки проводимостей халькогенидных элементов преобразующей матрицы был использован генератор импульсов Г5-54, формирующий импульсы частотой 0,001…100кГц, длительностью 0,5…1000мкс. Габаритные размеры генератора: 370х227х185 (рис.5.12).
5.3. Обучаемая система управления со зрением
для промышленного робота PM-01 (PUMA)23 марта 1990 года в Липецк приехали Богомолов Валерий Павлович – начальник лаборатории одного из отделов ЦНИИМаш и начальник сектора того же отдела Семенко Валерий Петрович. Мы показали им наш робот ТУР-10К, оснащенный техническим глазом, продемонстрировали поиск им заданного предмета, отслеживание траектории, уклонение от препятствий, коротко изложили принципы работы обучаемых систем. В тот же день гости составили техническое задание на установку обучаемой системы управления со зрением на робот PM-01 в лаборатории ЦНИИМаш и обучение его преследованию предмета, перемещающегося в пространстве. Согласно этому заданию была изготовлена обучаемая система с техническим глазом на 200 рецепторов и 6 исполнительных двигателей. В качестве рецепторов сетчатки технического глаза для робота PUMA были использованы двести фоторезисторов СФ3-1, которые были склеены между собой и залиты эпоксидной смолой (см. рис.5.13).

Фоторезисторы изготовленной сетчатки были пронумерованы, как показано на рис.5.14:
Расположение фоторезисторов, представленное на рис.5.13 позволяет более равномерно распределить фоточувствительные участки по площади сетчатки по сравнению с расположением в соответствии с которым светочувствительные участки располагаются в виде продольных линий (рис.4.2).
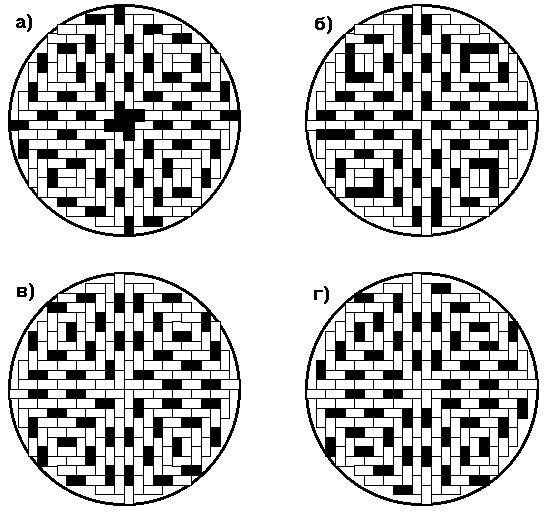
Далее, фоторезисторы сетчатки были разделены на четыре группы, как показано на рис.5.15 (рис.5.15,а – черным цветом выделена первая группа рецепторов; рис.5.15,б – черным цветом выделена вторая группа рецепторов; рис.5.15,в – черным цветом выделена третья группа рецепторов; рис.5.15,г – черным цветом выделена четвертая группа рецепторов).
Один из двух выходов каждого фоторезистора в отдельной группе был соединен с общей для данной группы шиной, предназначенной для подсоединения к источнику питания. Другой выход каждого фоторезистора отдельным проводком жгута (“зрительного нерва”) соединялся с отдельной строчной шиной резисторной преобразующей матрицы. Разделение рецепторов сетчатки на четыре группы позволяло обучать объект управления выполнению шестнадцати различных задач (поиска целей) за счет различных комбинаций включений питания групп рецепторов.
Сетчатка вставлялась в корпус технического глаза, который имел сменный объектив, направляющий изображение на сетчатку. Конструкция корпуса позволяла менять расстояние между объективом и сетчаткой для наведения фокусного расстояния. Для проецирования изображения на сетчатку использовался фотообъектив “Гелиос-103” с углом зрения 45о, с относительным отверстием 1:1,8 и фокусным расстоянием 53 мм.
В качестве резисторных элементов матрицы технического мозга были использованы подстроечные резисторы СП3-38в-0,125вт-2,2кОм-I номинальным сопротивлением 2,2 Ком. Матрица включала в себя 1200 (200х6: 200 – по числу выходов рецепторов технического глаза, 6 – по числу исполнительных двигателей) резисторов. Конструктивно матрица представляла собой четыре раскладывающиеся платы (см. рис.5.16).

С одной стороны каждая плата имела продольные проводящие дорожки, с другой стороны – поперечные. Подстроечные резисторы были напаяны на продольные дорожки, а контакты ползунов резисторов были соединены с поперечными дорожками, которые, в свою очередь, были соединены разъемами с выходами рецепторов технического глаза. Продольные дорожки были соединены с входами блока усилителей, выходные сигналы которых являлись управляющими для соответствующих электродвигателей робота.
В качестве блока питания постоянного тока обучаемой системы управления использовалась приставка выпрямительная Ш5.121.000 производственного объединения “Орловский завод УВМ имени К.Н.Руднева” (ТУ25-01.808-77) с выходным напряжением 9 и 12 вольт. Габариты выпрямительной приставки в мм: 135х80х70, масса – 0,85 кг, потребляемая мощность – 16 ВА.
В качестве блока питания постоянного тока усилителей выходных сигналов технического мозга использовались две спаренные выпрямительные приставки, обеспечивающие выходное напряжение от –12 до +12 вольт.
Комплект обучаемой системы управляющего зрения для робота PUMA в сборе показан на рис.5.17.
Регулирование доли сигнала управления двигателя от отдельного рецептора осуществляется смещением ползуна подстроечного резистора в ту или иную сторону от среднего нулевого положения.
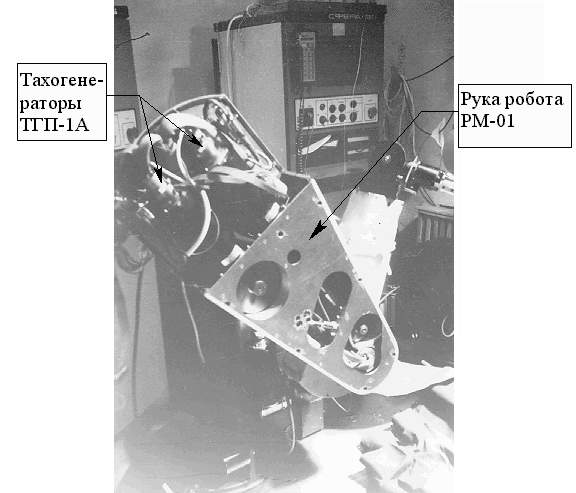
Поскольку обучаемая система управляющего зрения является аналоговой системой, “родные” дискретные датчики положения подвижных частей руки робота были заменены на тахогенераторы (рис.5.18). Использовались тахогенераторы марки ТГП-1А. Кроме этого, платы управления приводами стойки “Сфера 36” были заменены на платы управления приводами, аналогичные тем, которые используются для управления приводами робота ТУР-10К. На их входы были поданы сигналы управления обучаемой системы и сигналы тахогенераторов, а выходы их были соединены с широтно-импульсными преобразователями стойки “Сфера 36” (рис.5.19).
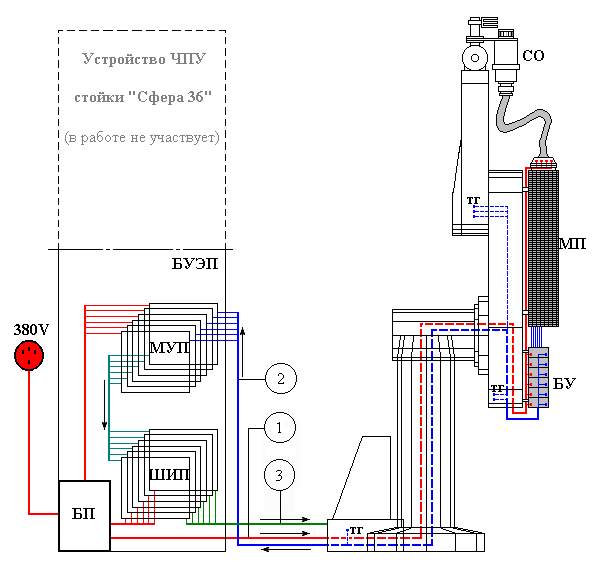
В схеме использованы следующие обозначения: БУЭП – стойка блоков усилителей электропитания; БП – блок питания стойки “Сфера 36”; МУП – платы модуля управления приводами БУЭП робота ТУР-10К; ШИП – платы модуля широтно-импульсного преобразователя стойки “Сфера 36”; тг – выходы тахогенераторов; СО – технический глаз системы очувствления; МП – матрица-преобразователь обучаемой системы управления; БУ – блок усилителей обучаемой системы управления;
1 – питание рецепторов СО и усилителей ОСУ; 2 – выходные сигналы усилителей БУ и тахогенераторов; 3 – сигналы управления приводами.
Для усиления выходных сигналов технического мозга и передачи их на входы плат модуля управления приводом двигателей робота использовались усилители, собранные по схеме, описанной в разделе 4.1.
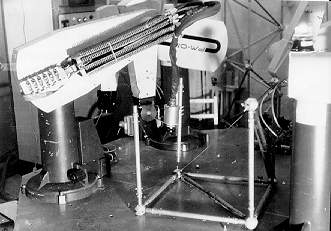
Изготовленная система была закреплена на руке робота и выходы ее подсоединены к входам управления приводами робота (рис.5.21).
Работы по изготовлению обучаемой системы управляющего зрения и установке ее на робот PM-01 проводились по хозяйственному договору ? 96-90 между Липецким Домом Техники НТО и научно-производственным центром “Информатика” (для ЦНИИМаш) “Разработка обучаемой системы управления робота PM-01 для решения задач преследования и захвата подвижного объекта” от 01.01.1990 года (срок окончания договора: 01.11.1990г.). Затем работа была продолжена в соответствии с хозяйственным договором между Липецким политехническим институтом (ЛипПИ) и ЦНИИМаш “Совершенствование узлов и процесса обучения обучаемой системы управления” от 01.01.1991 года (срок окончания договора: 01.12.1991г.). Робот обучался решению задач преследования подвижного объекта, уклонения от подвижного объекта, а также решению задачи поиска и сборки узлов. В качестве дальнейшей цели работы планировалось предложить разработанную обучаемую систему управляющего зрения в качестве одного из вариантов системы управления манипулятора космического челнока “Буран” (рис.5.22).

Однако, сложное положение космической отрасли, в которой она оказалась в то время, не позволило нашим планам сбыться. Работы по “Бурану” были свернуты.
| Site of Information
Technologies Designed by inftech@webservis.ru. |
|