“Что я написал, то написал”
Понтий Пилат
(Евангелие от Иоанна, гл.19, ст. 22)
Основным результатом исследований, проводимых научной группой В.М.Антонова в Липецком техническом университете с 1985 года, стала схемная и практическая реализация нового класса автоматических систем управления – обучаемых систем управления, которые применительно к роботам и другим подвижным объектам являются техническими нервными системами
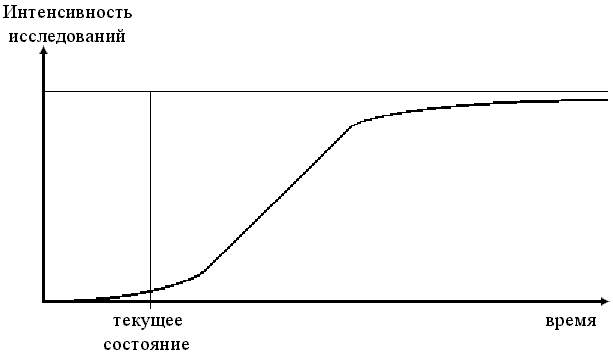
.Результаты настоящего этапа исследований позволяют сделать вывод, что развитие технических нервных систем управления находится в самой начальной стадии (см.график), поэтому эти системы представляют собой широкое поле деятельности для дальнейших исследований.
Можно указать следующие направления исследований:
– Поиск материалов для элементов резисторной матрицы, проводимость которых может изменяться под воздействием сигналов обучения и оставаться неизменной в процессе работы системы, а также конструирование этих элементов. Такими элементами могут быть электронные устройства, оптические элементы, электролитические и т.д.
– Другое направление исследований – поиск новых видов и конструкций рецепторов, определяемых теми задачами, которые будут решаться объектом с обучаемой системой управления.
– Важнейшим направлением дальнейших исследований является поиск новых принципов, методов, способов и приемов обучения объектов, оснащенных данными системами, с использованием игры, подражания и других средств обучения.
– И, наконец, необходимо расширять области применения обучаемых систем управления. Такие системы управления могут быть использованы не только для управления роботами, но и другими объектами техники: транспортными средствами, станками и т.д. Они могут применяться в качестве экспертных систем и систем регулирования технологическими процессами. Результаты исследований могут быть использованы в педагогике и медицине.
Важнейшим результатом появления технических нервных систем должно стать возвышение личности человека. С тех пор, как началось развитие техники, он всегда выступал ее придатком, являлся обслуживающим персоналом. Техника диктовала ему поведение по отношению к ней. Не исключение и компьютеры. Вот как говорит об этом писатель-фантаст Айзек Азимов: “Я попытался работать на компьютере, но у меня абсолютно ничего не получалось. Компьютер настаивал, чтобы я делал то, что хочет он, и с полным презрением игнорировал любые мои команды”.
Теперь от человека зависит – чему он обучит технику, оснащенную нервной системой. Быстрота и качество обучения будет зависеть от способностей человека передавать свои опыт и знания объекту техники. Такой объект техники станет аналогичным животному и даже человеку. Причем каждый такой объект будет обладать собственной индивидуальностью, которая является результатом индивидуальности его технической нервной системы и составляющих ее элементов, а также – результатом индивидуального обучения данного объекта.
Все же необходимо помнить, что жажда познания часто подводила Человека. Именно эта жажда превратила действительно райский сад, данный нам Богом, в технократическую среду обитания, непригодную для полноценной жизни. То же самое возможно и с появлением технических нервных систем. Отрицательным последствием развития обучаемых систем управления может стать ухудшение демографической ситуации, когда игрушки и другие объекты с техническими нервными системами могут заменить собой детей. Кроме этого, передача роботам многих функций может привести к потере людьми своих умений, превращению человечества в аристократическое общество, что в конечном итоге может привести к его вырождению.

Другой опасностью может стать то, что объекты, оснащенные техническими нервными системами, могучие и обладающие собственными самосознанием и волей выйдут из-под контроля человека и противопоставят себя ему. Вот как охарактеризовал человека современной науки в своей работе “Наследник человека” русский математик А.Филиппов (Андрей Иванович Лапин): “Сейчас трудится над искусственным тараканом. Мечтает заселить всю природу своими кибернетическими тварями. Но настоящая его мечта – гомункул. Ведь это было его юношеским сном. Создать себе своего человека, который, как и он сам, восстанет против своего создателя и убьет его”. Так что события фантастического кинофильма “Терминатор” о войне между роботами и людьми могут оказаться не такими уж и фантастическими.
Наконец, следует отметить, что в основе деятельности мозга лежит реакция на некоторое воздействие. Такой способностью (реагировать на воздействие) обладает любой материальный (и не материальный) объект. В этом проявляется единство функционирования мозга и объектов материальной природы. Отличие деятельности мозга от реакции других объектов в том, что у мозга реакции более сложные (хотя и у неживых объектов реакции тоже могут иметь сложный характер).
Работа мозга, таким образом, не является каким-то уникальным явлением природы. Принципы его работы заложены в самой материи, только проявляются они у разных объектов в разной степени и в разных формах.
| Site of Information
Technologies Designed by inftech@webservis.ru. |
|